RoboWare Studio是一个ROS集成开发环境。它使 ROS开发更加直观、简单、并且易于操作。可进行ROS工作区及包的管理、代码编辑、构建及调试。
Robotware下载地址: 百度网盘 密码:3iuk
sudo apt-get install build-essential
sudo apt-get install python-pip
sudo python -m pip install pylint
如果安装过程中产生错误,可参考: 抚琴弹出情调零的博客
5. 为支持 clang-format 相关功能,需要安装 clang-format-3.8 或更高版本
sudo apt-get install clang-format-3.8
下载Roboware Studio最新版,在下载的文档下,鼠标右键调出终端输入:
sudo dpkg -i roboware-studio_<version>_<architecture>.deb
i386为32位版本,amd64为64位版本. 安装过程会弹出 用户协议 可以按 ESC 选择确认!
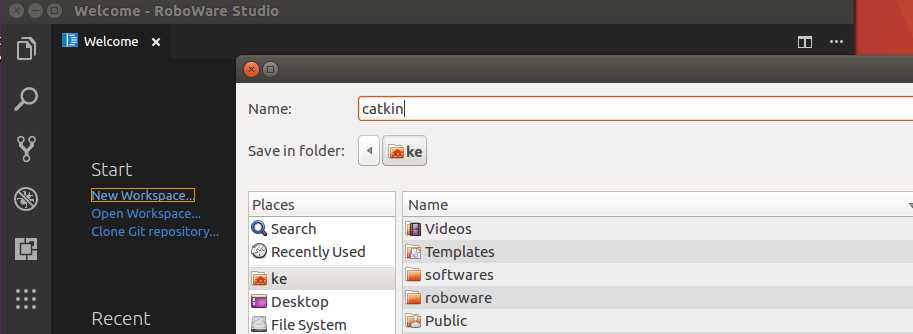
选择用户目录下,名称 : catkin_ws
创建工作空间之后的,窗口如下

选择Release/Debug

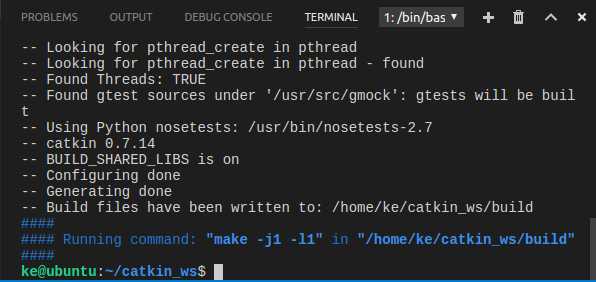
Ctrl+`调出Terminal, catkin_make构建之后:
测试ros是否正常运行,运行roscore:


测试正常, Ctrl+c结束即可
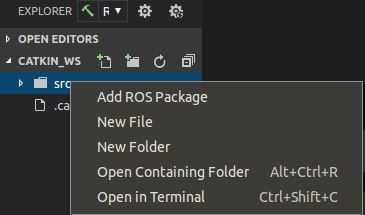
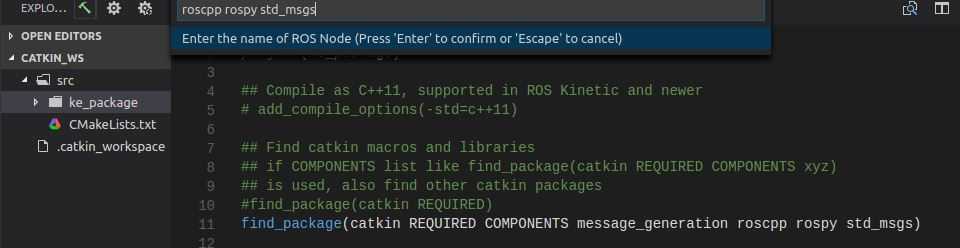
输入依赖的ROS包, 对应的CMakeLists.txt将生成相应的指令
原文:https://www.cnblogs.com/flyinggod/p/13836197.html