针孔成像模型是整个计算视觉的基石,个人认为无论从事计算视觉哪个子领域的研究,都应学习学习针孔成像模型这一理论。
学习针孔成像模型最好的资料莫过于OpenCV中的cv::ProjectPoints,此函数不仅实现了针孔成像模型,而且还实现了每个像素坐标对投影参数、畸变参数及投影外参的偏导数,即像素坐标对这些参数的Jacobian矩阵。
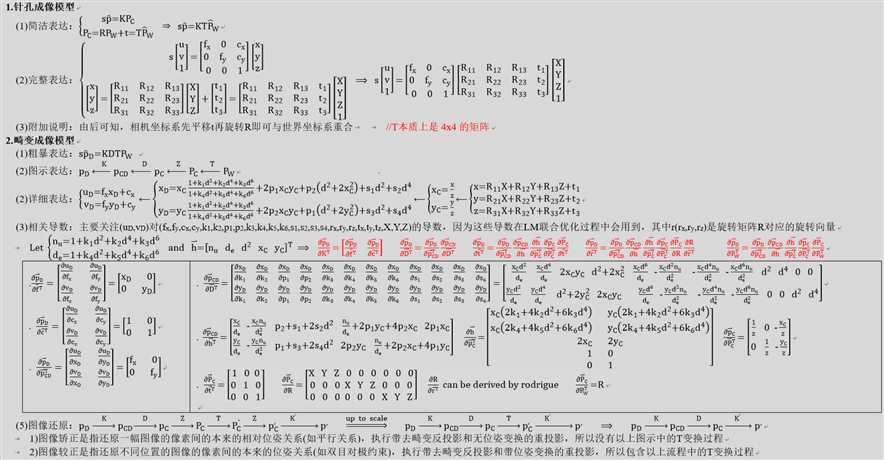
针孔成像模型及cv::ProjectPoints实现原理,如下图所示。
cv::ProjectPoints不足之处是对投影外参的偏导数和投影内参都采用了相同的求导法则,当只想计算对投影外参的偏导数时,这种求导方式计算量过大。
根据李代数的相关理论可知,对外参的导数(即旋转和平移)有三种实现:
(1)基于指数映射求导
(2)基于BCH公式求导
(3)基于扰动方式求导
以上三种求导方式,计算量依次递减。其中,基于扰动方式求导是视觉定位中最常使用的。
为此,我参考相关书籍,在cv::ProjectPoints的基础上增加了另外两种求导方式,并进行了测试验证。
以下是详细代码,依赖于C++14、OpenCV4.x和Spdlog。

1 #include <opencv2/opencv.hpp> 2 #include <spdlog/spdlog.h> 3 using namespace std; 4 using namespace cv; 5 6 class ProjectPointsEx 7 { 8 public: 9 using Mat121d = Matx<double, 12, 1>; 10 static void TestMe(int argc = 0, char** argv = 0) 11 { 12 int N = 999; 13 for (int k = 0; k < N; ++k) 14 { 15 Mat_<Vec3d> PWs(999, 1); cv::randu(PWs, 1111, 9999); 16 Matx33d K = K.randu(111, 999); K(0, 1) = K(1, 0) = K(2, 0) = K(2, 1) = 0.; K(2, 2) = 1; 17 Mat121d D = D.randu(0.1, 0.9); 18 Matx31d r = r.randu(11, 99); 19 Matx31d t = t.randu(111, 999); 20 21 //2.CalcByOpenCV 22 Mat p1s; 23 Mat_<double> dpdKDT1; 24 cv::projectPoints(PWs, r, t, K, D, p1s, dpdKDT1); 25 26 //3.CalcByDIY 27 Mat_<Matx21d> p2s(PWs.size()); 28 Mat_<double> _dpdKDT2[5], dpdKDT2;//dpdf1/dpdc1/dpdd1/dpdr1/dpdt1; 29 ProjectPointsEx::run(PWs, r, t, K, D, p2s, _dpdKDT2, _dpdKDT2 + 1, _dpdKDT2 + 2, _dpdKDT2 + 3, _dpdKDT2 + 4); 30 hconcat(_dpdKDT2, 5, dpdKDT2); 31 32 //4.AnalyzeError 33 double infps1ps2 = norm(p1s, p2s, NORM_INF); 34 double infdpdKDT1dpdKDT2 = norm(dpdKDT1, dpdKDT2, NORM_INF); 35 36 //5.PrintError 37 cout << endl << "LoopCount: " << k << endl; 38 if (infps1ps2 > 0 || infdpdKDT1dpdKDT2 > 0) 39 { 40 cout << endl << "5.1PrintError" << endl; 41 cout << endl << "infps1ps2: " << infps1ps2 << endl; 42 cout << endl << "infdpdKDT1dpdKDT2: " << infdpdKDT1dpdKDT2 << endl; 43 if (0) 44 { 45 cout << endl << "5.2PrintDiff" << endl; 46 cout << endl << "dpdKDT1: " << endl << dpdKDT1.t() << endl; 47 cout << endl << "dpdKDT2: " << endl << dpdKDT2.t() << endl; 48 cout << endl << "p1s: " << endl << p1s << endl; 49 cout << endl << "p2s: " << endl << p2s << endl; 50 cout << endl << "5.3PrintOthers" << endl; 51 cout << endl << "PWs: " << endl << PWs << endl; 52 cout << endl << "K: " << endl << K << endl; 53 cout << endl << "D: " << endl << D.t() << endl; 54 //cout << endl << "r-degree: " << endl << r.t() << endl << degree.t() << endl; 55 cout << endl << "t: " << endl << t.t() << endl; 56 } 57 cout << endl << "Press any key to continue" << endl; 58 std::getchar(); 59 } 60 } 61 } 62 63 public: 64 static void run(Mat_<Matx31d> PWs, Matx31d r, Matx31d t, Matx33d K, Mat121d D, Mat_<Matx21d>& pDs, 65 Mat_<double>* dpdr = 0, Mat_<double>* dpdt = 0, Mat_<double>* dpdF = 0, Mat_<double>* dpdC = 0, Mat_<double>* dpdD = 0, Mat_<double>* dpdPW = 0, 66 bool fixFxFyRatio = false, int derivRotWay = 0) 67 { 68 //1.Projection params 69 double fx = K.val[0]; 70 double fy = K.val[4]; 71 double cx = K.val[2]; 72 double cy = K.val[5]; 73 74 //2.Distortion params 75 double k1 = D.val[0]; 76 double k2 = D.val[1]; 77 double p1 = D.val[2]; 78 double p2 = D.val[3]; 79 double k3 = D.val[4]; 80 double k4 = D.val[5]; 81 double k5 = D.val[6]; 82 double k6 = D.val[7]; 83 double s1 = D.val[8]; 84 double s2 = D.val[9]; 85 double s3 = D.val[10]; 86 double s4 = D.val[11]; 87 //double a = D.val[12], b = D.val[13]; 88 89 //3.Translation params 90 double tx = t.val[0]; 91 double ty = t.val[1]; 92 double tz = t.val[2]; 93 94 //4.Rotation params 95 Matx33d R; 96 Mat_<double> _dRdr; cv::Rodrigues(r, R, dpdr ? _dRdr : noArray()); 97 _dRdr = _dRdr.t(); Matx<double, 9, 3> dRdr; if (dpdr) memcpy(dRdr.val, _dRdr.ptr<double>(), sizeof(dRdr)); 98 99 //5.ReProjection 100 for (int k = 0; k < PWs.total(); ++k) 101 { 102 //5.1 WorldCoordinate 103 double X = PWs(k)(0); 104 double Y = PWs(k)(1); 105 double Z = PWs(k)(2); 106 107 //5.2 CameraCoordinate 108 double x = R.val[0] * X + R.val[1] * Y + R.val[2] * Z + tx; 109 double y = R.val[3] * X + R.val[4] * Y + R.val[5] * Z + ty; 110 double z = R.val[6] * X + R.val[7] * Y + R.val[8] * Z + tz; 111 112 //5.3 StandardPhysicsCoordinate 113 double iz = z ? 1. / z : 1; 114 double xc = x * iz; 115 double yc = y * iz; 116 117 //5.4 DistortionPhysicsCoordinate 118 double xc2 = xc * xc; 119 double yc2 = yc * yc; 120 double d2 = xc2 + yc2; 121 double xcyc = 2 * xc * yc; 122 double d4 = d2 * d2; 123 double d6 = d2 * d4; 124 double d2xc2 = d2 + 2 * xc2; 125 double d2yc2 = d2 + 2 * yc2; 126 double nu = 1 + k1 * d2 + k2 * d4 + k3 * d6; 127 double de = 1. / (1 + k4 * d2 + k5 * d4 + k6 * d6); 128 double xd = xc * nu * de + p1 * xcyc + p2 * d2xc2 + s1 * d2 + s2 * d4; 129 double yd = yc * nu * de + p2 * xcyc + p1 * d2yc2 + s3 * d2 + s4 * d4; 130 131 //5.5 DistortionPixelCoordinate 132 pDs(k) = Matx21d(xd * fx + cx, yd * fy + cy); 133 134 //5.6 dpdF: derivatives with respect to the focal lengths 135 if (dpdF) 136 { 137 if (dpdF->empty()) dpdF->create(PWs.rows << 1, 2); 138 double* ptr = dpdF->ptr<double>(k << 1); 139 ptr[0] = xd; ptr[1] = 0; 140 ptr[2] = 0; ptr[3] = yd; 141 } 142 143 //5.7 dpdC: derivatives with respect to the principal point 144 if (dpdC) 145 { 146 if (dpdC->empty()) dpdC->create(PWs.rows << 1, 2); 147 double* ptr = dpdC->ptr<double>(k << 1); 148 ptr[0] = 1.; ptr[1] = 0; 149 ptr[2] = 0; ptr[3] = 1.; 150 } 151 152 //5.8 dpdD: derivatives with respect to the distortion coefficients 153 if (dpdD) 154 { 155 if (dpdD->empty()) dpdD->create(PWs.rows << 1, 12); 156 double* ptr = dpdD->ptr<double>(k << 1); 157 158 Matx22d dpDdpCD; dpDdpCD << 159 fx, 0, 160 0, fy; 161 162 Matx<double, 2, 12> dpCDdD; dpCDdD << 163 xc * d2 * de, xc* d4* de, xcyc, d2xc2, xc* d6* de, -xc * d2 * nu * de * de, -xc * d4 * nu * de * de, -xc * d6 * nu * de * de, d2, d4, 0, 0, 164 yc* d2* de, yc* d4* de, d2yc2, xcyc, yc* d6* de, -yc * d2 * nu * de * de, -yc * d4 * nu * de * de, -yc * d6 * nu * de * de, 0, 0, d2, d4; 165 166 Matx<double, 2, 12> dpDdD = dpDdpCD * dpCDdD; 167 memcpy(ptr, dpDdD.val, 24 * sizeof(double)); 168 } 169 170 //5.9 dpdr&dpdt: derivatives with respect to the pose 171 if (dpdr || dpdt || dpdPW) 172 { 173 Matx22d dpDdpCD; 174 dpDdpCD << fx, 0, 0, fy; 175 176 Matx<double, 2, 5> dpCDdh; dpCDdh << 177 xc * de, -xc * nu * de * de, p2 + s1 + 2 * s2 * d2, nu* de + 2 * p1 * yc + 4 * p2 * xc, 2 * p1 * xc, 178 yc* de, -yc * nu * de * de, p1 + s3 + 2 * s4 * d2, 2 * p2 * yc, nu* de + 2 * p2 * xc + 4 * p1 * yc; 179 180 Matx<double, 5, 2> dhdpC; dhdpC << 181 xc * (2 * k1 + 4 * k2 * d2 + 6 * k3 * d4), yc* (2 * k1 + 4 * k2 * d2 + 6 * k3 * d4), 182 xc* (2 * k4 + 4 * k5 * d2 + 6 * k6 * d4), yc* (2 * k4 + 4 * k5 * d2 + 6 * k6 * d4), 183 2 * xc, 2 * yc, 184 1, 0, 185 0, 1; 186 187 Matx23d dpCdPC; dpCdPC << 188 iz, 0, -xc * iz, 189 0, iz, -yc * iz; 190 191 if (dpdt)//dpdt: derivatives with respect to the translation vector 192 { 193 if (dpdt->empty()) dpdt->create(PWs.rows << 1, 3); 194 double* ptr = dpdt->ptr<double>(k << 1); 195 196 Matx23d dpDdt = dpDdpCD * dpCDdh * dhdpC * dpCdPC; 197 memcpy(ptr, dpDdt.val, 6 * sizeof(double)); 198 } 199 200 if (dpdr)//dpdr: derivatives with respect to the rotation vector 201 { 202 if (dpdr->empty()) dpdr->create(PWs.rows << 1, 3); 203 double* ptr = dpdr->ptr<double>(k << 1); 204 205 Matx23d dpDdr; 206 if (derivRotWay == 0)//(1)by exponential map 207 { 208 Matx<double, 3, 9> dPCdR; dPCdR << 209 X, Y, Z, 0, 0, 0, 0, 0, 0, 210 0, 0, 0, X, Y, Z, 0, 0, 0, 211 0, 0, 0, 0, 0, 0, X, Y, Z; 212 dpDdr = dpDdpCD * dpCDdh * dhdpC * dpCdPC * dPCdR * dRdr; 213 } 214 else 215 { 216 Matx33d _skewPC 217 ( 218 0, (z - tz), -(y - ty), 219 -(z - tz), 0, (x - tx), 220 (y - ty), -(x - tx), 0 221 ); 222 if (derivRotWay == 1)//(2)by BCH formula 223 { 224 double theta = sqrt(r.val[0] * r.val[0] + r.val[1] * r.val[1] + r.val[2] * r.val[2]); 225 double itheta = 1 / theta; 226 double sn = sin(theta); 227 double cs1 = 1 - cos(theta); 228 Matx31d n(r.val[0] * itheta, r.val[1] * itheta, r.val[2] * itheta); 229 Matx33d nskew(0, -n.val[2], n.val[1], n.val[2], 0, -n.val[0], -n.val[1], n.val[0], 0); 230 Matx33d Jl = itheta * sn * Matx33d::eye() + itheta * cs1 * nskew + (1 - itheta * sn) * n * n.t(); 231 dpDdr = dpDdpCD * dpCDdh * dhdpC * dpCdPC * _skewPC * Jl; 232 } 233 else if (derivRotWay == 2) dpDdr = dpDdpCD * dpCDdh * dhdpC * dpCdPC * _skewPC; //(3)by perturbance for reduced LocalParameterization of ceresSolver 234 } 235 236 memcpy(ptr, dpDdr.val, 6 * sizeof(double)); 237 238 if (derivRotWay == 3) //(4)by perturbance for general LocalParameterization of ceresSolver 239 { 240 if (dpdr->empty() || dpdr->cols != 9) dpdr->create(PWs.rows << 1, 9); 241 double* ptr = dpdr->ptr<double>(k << 1); 242 Matx<double, 3, 9> dPCdR; dPCdR << 243 X, Y, Z, 0, 0, 0, 0, 0, 0, 244 0, 0, 0, X, Y, Z, 0, 0, 0, 245 0, 0, 0, 0, 0, 0, X, Y, Z; 246 Matx<double, 2, 9> dpDdR = dpDdpCD * dpCDdh * dhdpC * dpCdPC * dPCdR; 247 memcpy(ptr, dpDdR.val, 18 * sizeof(double)); 248 } 249 } 250 251 if (dpdPW)//dpdPW: derivatives with respect to the worldcoordinate 252 { 253 if (dpdPW->empty()) dpdPW->create(PWs.rows << 1, 3); 254 double* ptr = dpdPW->ptr<double>(k << 1); 255 256 Matx23d dpDdPW = dpDdpCD * dpCDdh * dhdpC * dpCdPC * R; 257 memcpy(ptr, dpDdPW.val, 6 * sizeof(double)); 258 } 259 } 260 } 261 } 262 }; 263 264 int main(int argc, char** argv) { ProjectPointsEx::TestMe(argc, argv); return 0; }
OpenCV-Ima3D学习日志:ProjectPoints分析与实现
原文:https://www.cnblogs.com/dzyBK/p/13934461.html
