
#include "pch.h"
#include <iostream>
#include <string>
#include <cstring>
#include <cstdlib>
#include <vector>
#include "gocvhelper.h"
using namespace std;
using namespace cv;
//2020年11月8日10:26:09
//ssd 流水线文件
int main(int argc, char *argv[])
{
// Load your image
cv::Mat src = cv::imread("e:/template/twoblobs_1.bmp");
// Check if everything was fine
if (!src.data)
return -1;
// Show source image
cv::imshow("src", src);
// Create binary image from source image
cv::Mat gray;
cv::cvtColor(src, gray,COLOR_BGR2GRAY);
//cv::imshow("gray", gray);
// Obtain binary image
Mat bw;
cv::threshold(gray, bw, 40, 255, cv::THRESH_BINARY_INV|cv::THRESH_OTSU);
cv::imshow("bin", bw);
// Erode a bit
Mat kernel = Mat::ones(3, 3, CV_8UC1);
erode(bw, bw, kernel);
//imshow("erode", bw);
// Perform the distance transform algorithm
Mat dist;
distanceTransform(bw, dist, cv::DIST_L2, 5);
// Normalize the distance image for range = {0.0, 1.0}
// so we can visualize and threshold it
normalize(dist, dist, 0, 1., NORM_MINMAX);
imshow("distTransf", dist);
// Threshold to obtain the peaks
// This will be the markers for the foreground objects
threshold(dist, dist, .5, 1., cv::THRESH_BINARY);
// Dilate a bit the dist image, this can be optional since in
// other use case might cause problems. Here though it works quite well
Mat kernel1 = Mat::ones(5, 5, CV_8UC1);
dilate(dist, dist, kernel1, Point(-1, -1), 2);
imshow("peaks", dist);
// Create the CV_8U version of the distance image
// It is needed for findContours()
Mat dist_8u;
dist.convertTo(dist_8u, CV_8U);
// Find total markers
vector<Vec4i> hierarchy;
vector<vector<Point> > contours;
findContours(dist_8u, contours, hierarchy, cv::RETR_TREE,cv::CHAIN_APPROX_SIMPLE);
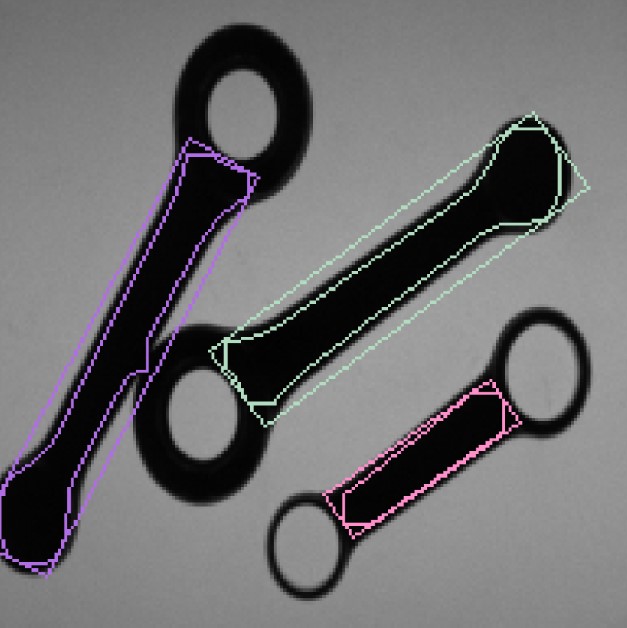
// Find the rotated rectangles
vector<RotatedRect> minRect(contours.size());
for (size_t i = 0; i < contours.size(); i++)
{
minRect[i] = minAreaRect(Mat(contours[i]));
}
RNG rng(12345);
for (size_t i = 0; i < contours.size(); i++)
{
Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
// contour
drawContours(src, contours, static_cast<int>(i), color, 1, 8, vector<Vec4i>(), 0, Point());
// rotated rectangle
Point2f rect_points[4]; minRect[i].points(rect_points);
for (int j = 0; j < 4; j++)
line(src, rect_points[j], rect_points[(j + 1) % 4], color, 1, 8);
}
/* From here you can extract the orientation of each object by using
* the information that you can extract from the contours and the
* rotate rectangles. For example, the center point, rectange angle, etc...
*/
cv::imshow("result", src);
waitKey(0);
return 0;
}#include "pch.h"
#include <iostream>
#include <string>
#include <cstring>
#include <cstdlib>
#include <vector>
#include "gocvhelper.h"
using namespace std;
using namespace cv;
//2020年11月8日10:26:09
//ssd 流水线文件
int main(int argc, char *argv[])
{
// Load your image
cv::Mat src = cv::imread("e:/template/twoblobs_1.bmp");
if (src.empty())
return -1;
Mat bw;
cvtColor(src, bw, COLOR_BGR2GRAY);
bw = bw < 60;
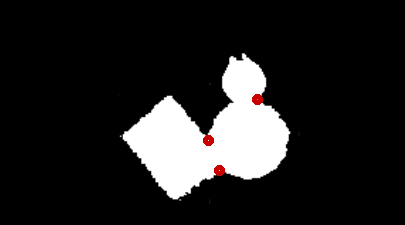
// Find contours
vector<vector<Point> > contours;
vector<int> contoursHull;
vector<Vec4i> defects;
findContours(bw, contours, RETR_EXTERNAL, CHAIN_APPROX_NONE);
for (size_t i = 0; i < contours.size(); i++)
{
if (contourArea(contours[i]) > 500)
{
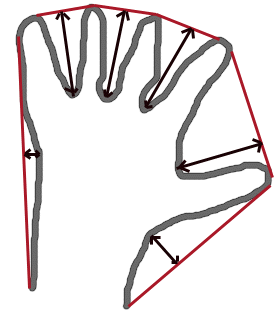
approxPolyDP(contours[i], contours[i], 9, true);//多边形拟合
convexHull(contours[i], contoursHull, true);//寻找凸包
convexityDefects(contours[i], contoursHull, defects);//计算缺陷
for (size_t j = 0; j < defects.size(); j++)
{
Vec4i defpoint = defects[j];
circle(src, contours[i][defpoint[2]], 2, Scalar(0, 255, 0), 1);
}
}
}
imshow("result", src);
waitKey();
return 0;
}#include "pch.h"
#include <iostream>
#include <string>
#include <cstring>
#include <cstdlib>
#include <vector>
#include "gocvhelper.h"
using namespace std;
using namespace cv;
//2020年11月8日10:26:09
//ssd 流水线文件
int main(int argc, char *argv[])
{
// Load your image
cv::Mat src = cv::imread("e:/template/twoblobs_1.bmp");
if (src.empty())
return -1;
Mat bw;
cvtColor(src, bw, COLOR_BGR2GRAY);
bw = bw < 60;
// Find contours
vector<vector<Point> > contours;
vector<int> contoursHull;
vector<Vec4i> defects;
findContours(bw.clone(), contours, RETR_EXTERNAL, CHAIN_APPROX_NONE);
for (size_t i = 0; i < contours.size(); i++)
{
if (contourArea(contours[i]) > 500)
{
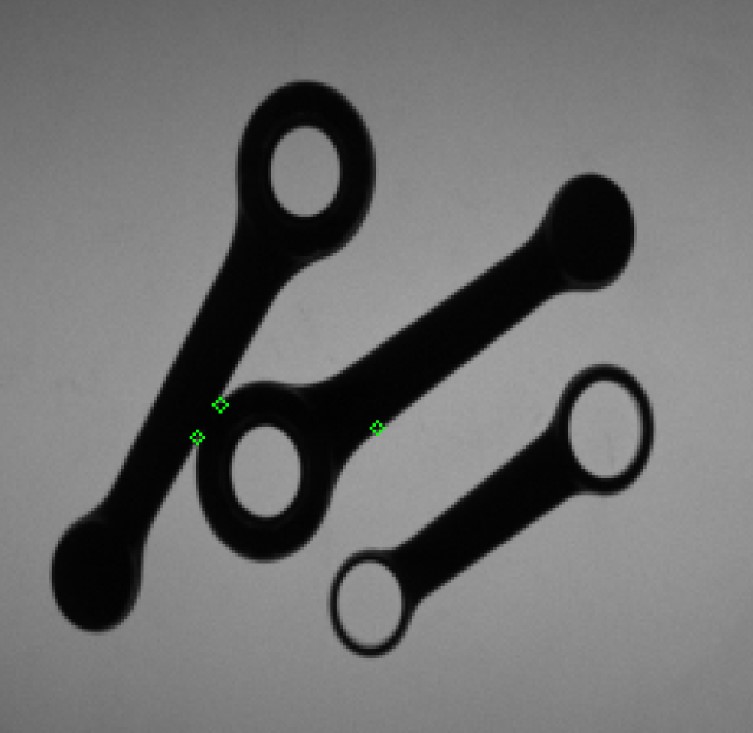
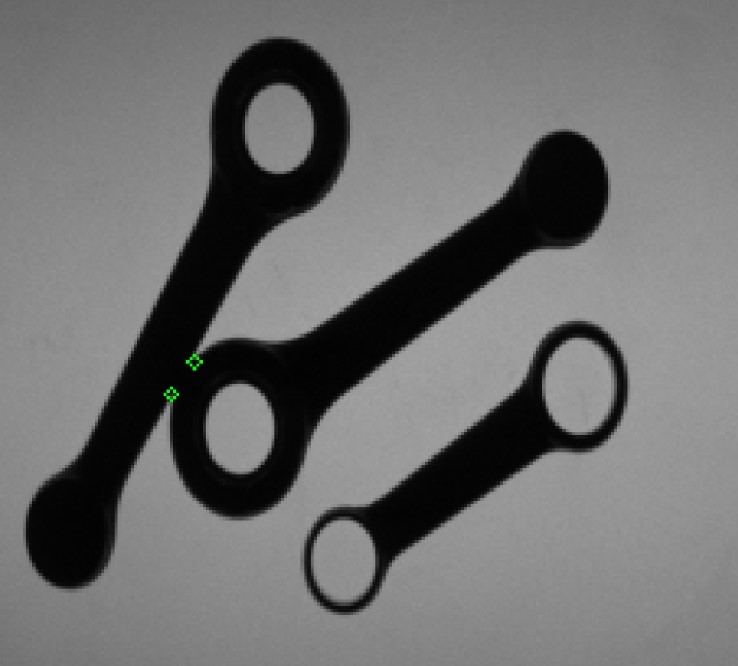
approxPolyDP(contours[i], contours[i], 2, true);
convexHull(contours[i], contoursHull, true);
convexityDefects(contours[i], contoursHull, defects);
for (size_t j = 0; j < defects.size(); j++)
{
Vec4i defpoint = defects[j];
Point pt = contours[i][defpoint[2]]; // get defect point
Rect r3x3(pt.x - 2, pt.y - 2, 5, 5); // create 5x5 Rect from defect point
// maybe no need but to be sure that the rect is in the image
r3x3 = r3x3 & Rect(0, 0, bw.cols, bw.rows);
int non_zero_pixels = countNonZero(bw(r3x3));
cout << non_zero_pixels << endl;
if (non_zero_pixels > 17)
circle(src, contours[i][defpoint[2]], 2, Scalar(0, 255, 0), 1);
}
}
}
imshow("result", src);
waitKey();
return 0;
waitKey();
return 0;
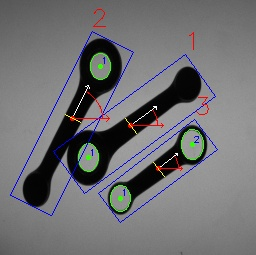
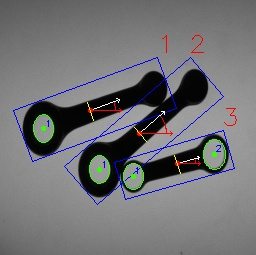
}// Drawing orientation angle
float angle = -rod.orientation;
float length = rod.length/5;
ellipse(image, rod.barycenter, Size(rod.length/6,rod.length/6), 0, 0, -rod.orientation, Scalar(0,0,255));
Point2f P2;
P2.x = (rod.barycenter.x + length * cos(angle * CV_PI / 180.0));
P2.y = (rod.barycenter.y + length * sin(angle * CV_PI / 180.0));
arrowedLine(image, rod.barycenter, P2, Scalar(255,255,255));
P2.x = (rod.barycenter.x + length * cos(0));
P2.y = (rod.barycenter.y + length * sin(0));
arrowedLine(image, rod.barycenter, P2, Scalar(0,0,255));Detach blobs with a contact point
原文:https://www.cnblogs.com/jsxyhelu/p/14014506.html