阻抗控制分为基于力的阻抗控制和基于位置的阻抗控制,另一种说法是阻抗控制和导纳控制。两者都是做柔顺控制的常用方法。导纳控制,位置内环,通过检测外部力产生位置修正量,阻抗控制,力内环,通过检测位移变化,产生相应的阻抗力,两者都可以表现为柔顺性,但导纳控制更易实验,详细诸位可以去知网查阅相关硕博士论文。控制框图如下:
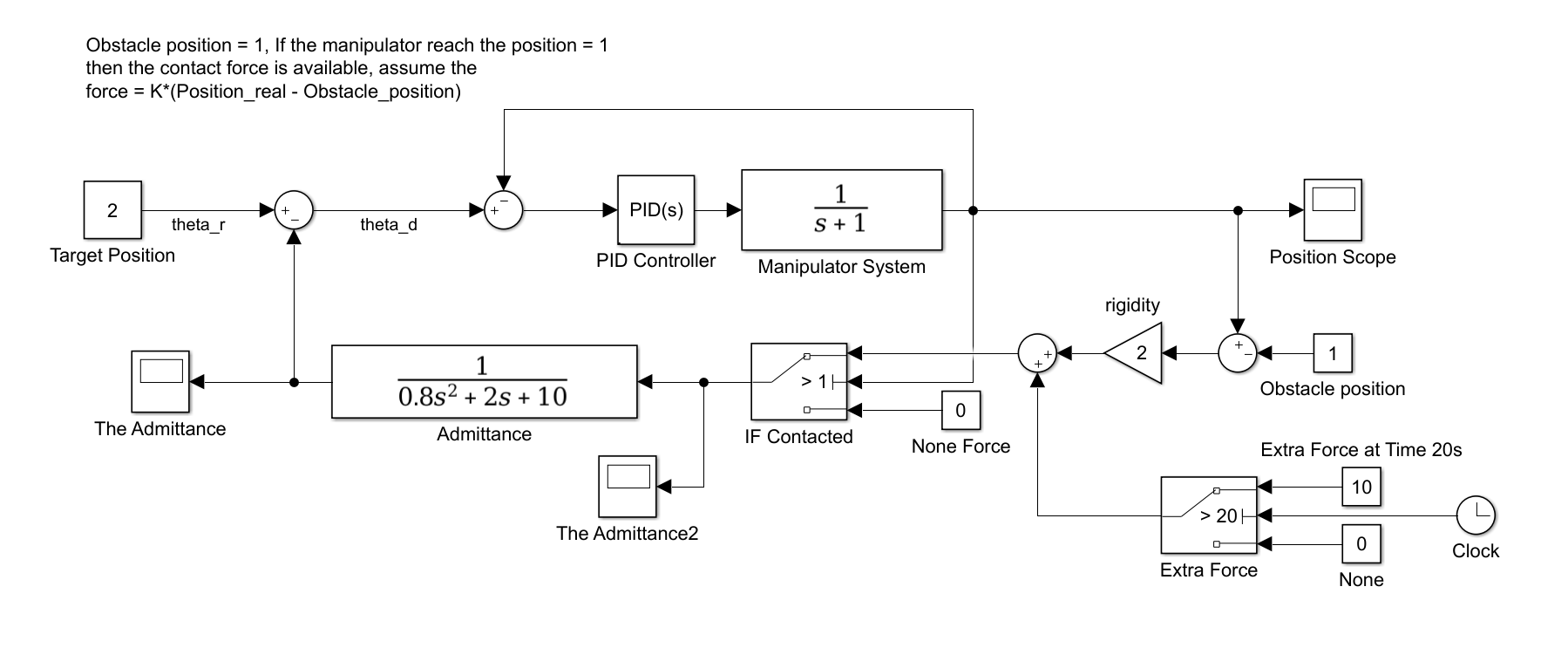
图1 导纳控制
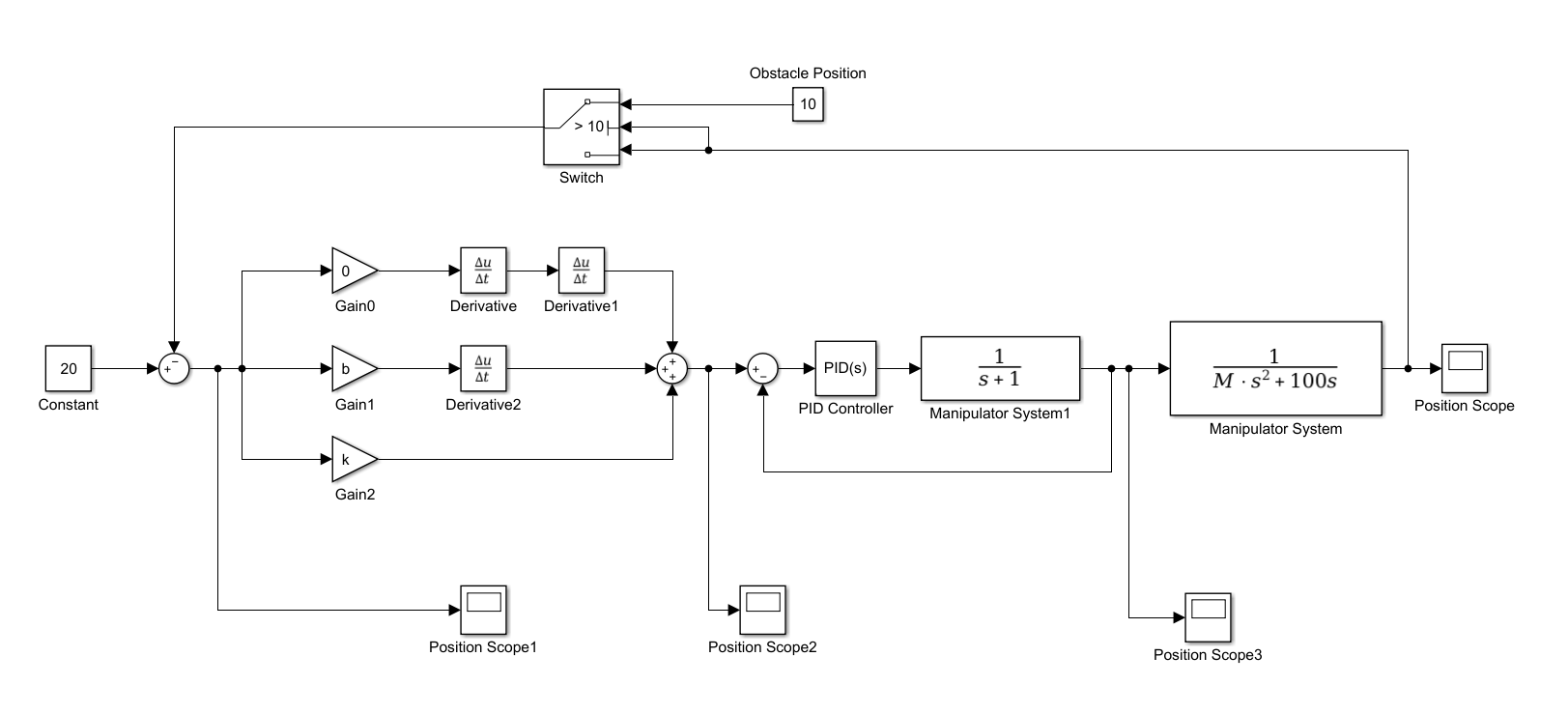
图2 阻抗控制
阻抗控制器与导纳控制器一组关键的参数是J,B,K或者M,B,K,这取决于你控制的是转动件还是移动件,事实上,机电系统很多都可以以MBK模型表示,之不多以上的参数都可以用等效动能或者等效消耗的功来计算。
仿真发现,在阻抗控制中加入J或者M环节,可能会带来系统的震荡(如果此时共轭极点为主导极点的话),所以,我一般不加这个M或J环节以避免提升系统的阶次带来不稳定。
当PD控制中参数较小时,系统也可以表现为柔顺性,但这种单单的PD控制器自由度很小,与导纳控制的区别在不与外界环境接触时的响应特性无法控制,因为PD控制器中的参数用来表现为柔顺性,而导纳控制却可以调节位置内环控制参数以调整系统响应特性。
做了一个单关节电机导纳控制实验,无刷直流电机,FOC控制,力传感器为薄膜压力传感器,用橡皮筋变形程度表征力的大小,如图3:
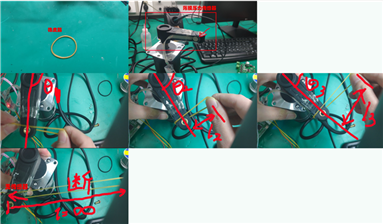
图3 导纳控制实验
[!链接已失效]
原文:https://www.cnblogs.com/QiQi-Robotics/p/14128022.html