INCLUDE_PATH和LIB_PATH,改为本机opencv的路径make或者mingw32-make即可编译? 终端输入./harris.exe(window环境)即可运行, 按下空格键即可做一次Harris Corner检测,程序会自动将中间结果的图保存下来. 再按一次空格, 可以继续选择.
按下空格后从摄像头读取图片, 并转为灰度图
使用sobel算子计算Ix,Iy的值, 代码中采用的为5*5的sobel算子
计算Ix采用的算子
计算Iy采用的算子

使用window(x,y)窗口对Ix,Iy进行加权平均,窗口算子如下

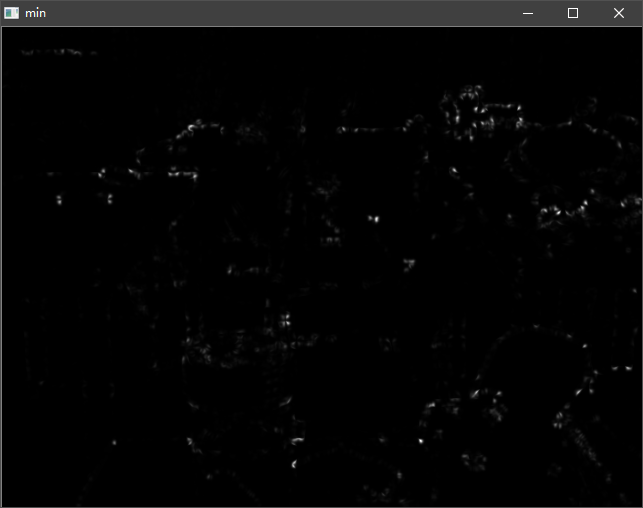
计算特征矩阵的特征值max, min

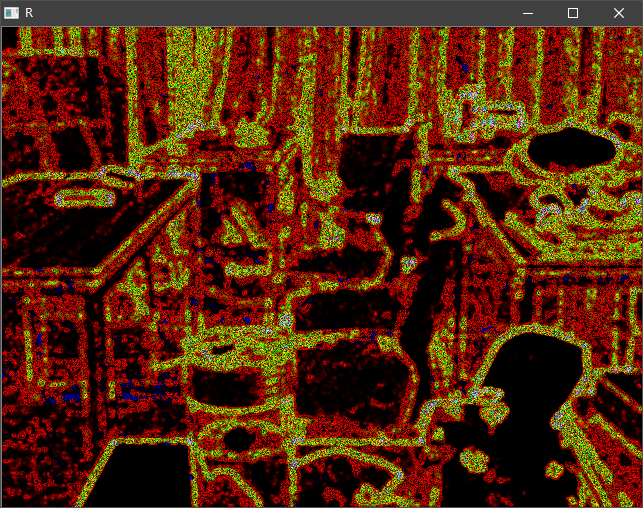
根据以下公式计算R的值

最后根据R的值来选取特征点(其中R值为正且数值较大的点归为角点, R值为负且值较大的点归为边缘点, 剩下的归为块状区域点.
自己封装了一个卷积函数, 用于sobel算子求梯度和window窗口求加权平均值, 函数核心代码如下:
/**
* @param image 被卷积的矩阵,通道数需要为1
* @param filter 卷积的算子, 长和宽需要是奇数
* @return 卷积的结果, 大小和image保持一致
* @description: 计算卷积
*/
cv::Mat Harris::convolve(cv::Mat image,cv::Mat filter){
for(int y = 0; y < image_h; y++){
for(int x = 0; x < image_w; x++){
for(int j = -half_filter_h; j <= half_filter_h; j++){
for(int i = -half_filter_w; i <= half_filter_w; i++){
//卷积的值越界(超出原图的范围,则该点用中心点代替)
if(x+i<0 || x+i >= image_w || y+j < 0 || y+j >= image_h){
...//省略, 算子扫描时越界, 则用当前点的值代替
}else{
...//细节省略
}
}
}
}
}
}
计算特征矩阵的特征值, 计算特征值时采用opencv提供的cv::eigen函数进行实现, 将得到的两个参数分别存入max和min图中.
计算得到R图后, 设置一定的阈值进行筛选, 和实验二Hough检测结果类似, 检测结果往往是扎堆的, 为了防止过于密集, 采用了一个MASK*MASK大小掩码对于区域的点进行筛选
使用sobel算子进行梯度求职的时候, 将一个二维的算子查分成两个一维的算子进行卷积, 以达到降低时间复杂度的目的.
/**
* 卷积算子
* 2 2 4 2 2
* 1 1 2 1 1
* 0 0 0 0 0
* -1 -1 -2 -1 -1
* -2 -2 -4 -2 -2
*/
int y_filter[] = {2,1,0,-1,-2};
int x_filter[] = {1,1,2,1,1};
cv::Mat tmp = convolve<uchar,int32_t>(image,cv::Mat(5,1,CV_32S,y_filter));
Iy = convolve<int32_t,int32_t>(tmp,cv::Mat(1,5,CV_32S,x_filter));
设置了一个阈值自动调整机制: 对于不同的结果, 往往会需要不同的阈值. 在阈值过大的情况下, 检测到的角点就会偏少, 所以函数在实现时, 发现检测的角点较少时( < 20), 会自动降低阈值重新检测.核心代码如下:
vector<cv::Point> Harris::getCorners(int threshold)
{
const double MIN_THRES = 100; //最小阈值
//默认取最大值的十分之一
//默认为相对值, 对于纯色图则不适用, 所以设置100的最小阈值
if(threshold == 0) {
threshold = max(0.05*max_r,MIN_THRES);
}
....//检测角点
//检测的点过少, 则降低标准再检测一次
if(threshold>MIN_THRES && points.size()<20){
points = getCorners(threshold*0.8);
}
return points;
}
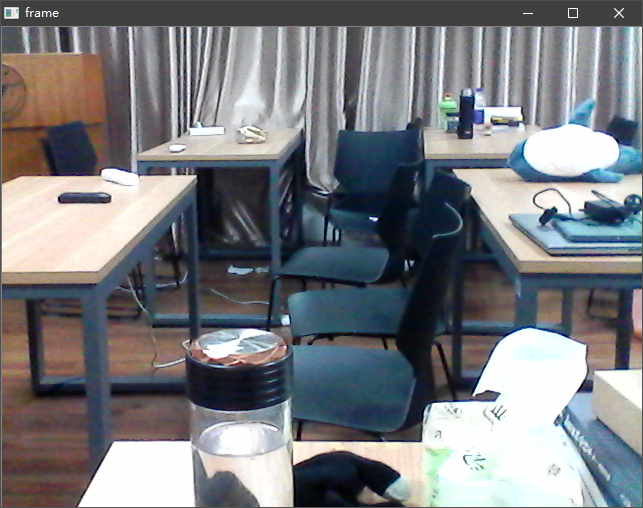
摄像头读入的原图展示如下:
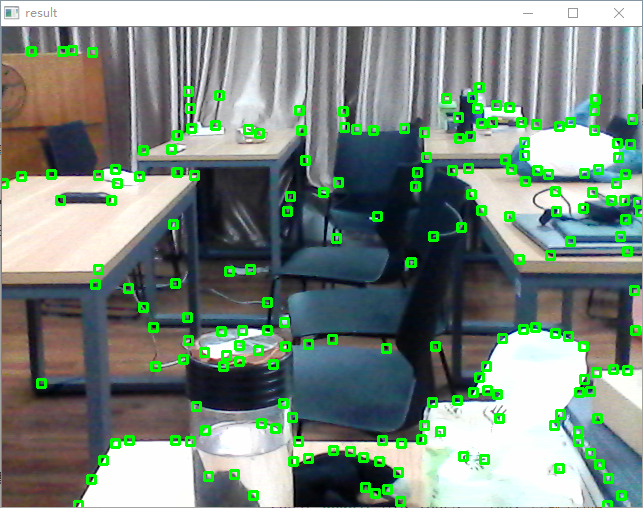
按下空格键, 经过一次Harris Corner检测的结果如下: 可以观察到,复杂场景情况下,桌子,椅子和一些小的物品的角点基本上都能够被正确地识别. (但是也存在少量的点没有被检测出来)
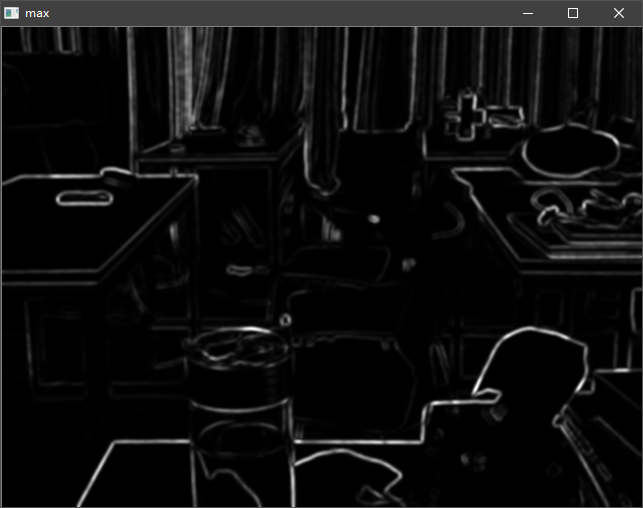
该场景的一些过程图展示如下, 第一张图为特征值中较大者, 第二张为特征值较小者, 第三章图为R图. 在R图中,可以较为直观地看到不同像素点的R值, 其中红色和黑色区域 表示R值比较小, 即块状区域, 黄色表示边缘区域, 白色部分就是我们需要找的角点部分.
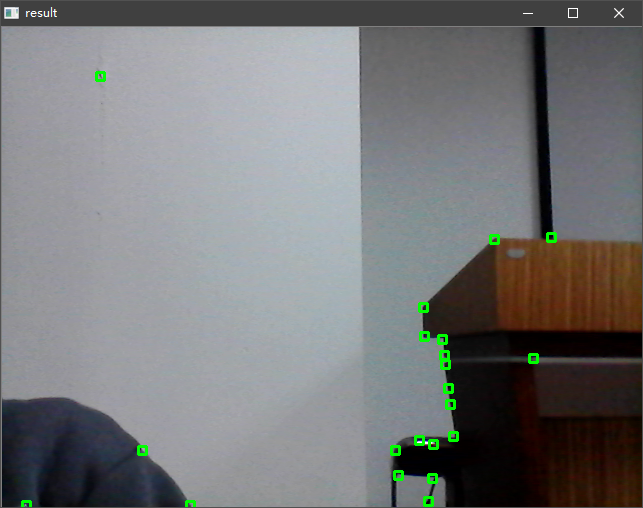
对于一些比较简单的场景, 由于有最小识别数目的保证, 检测效果也比较令人满意, 但是相比于复杂的场景, 将边缘点误认为角点的概率会增大. 展示图如下
原文:https://www.cnblogs.com/ofcwy/p/14143452.html