结合:【Matlab】简单的滑模控制程序及Simulink仿真本片文章观看,此篇文章是在这篇文章的基础上进行修改的
输出u的推导过程
如果不明白控制量输出u的推到过成请看:【控制理论】滑模控制最强解析这篇文章
根据推到结果写s—function函数
控制器的s-function
function [sys,x0,str,ts] = simple_adaptive_controller(t, x, u, flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes; % 调用初始化子函数
case 1,
sys=[];
case 2,
sys=[];
case 3,
sys=mdlOutputs(t,x,u); %计算输出子函数
case 4,
sys=[]; %计算下一仿真时刻子函数
case 9,
sys=[]; %终止仿真子函数
otherwise
DAStudio.error(‘Simulink:blocks:unhandledFlag‘, num2str(flag));
end
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes %初始化子函数
sizes = simsizes;
sizes.NumContStates = 0; %连续状态变量个数
sizes.NumDiscStates = 0; %离散状态变量个数
sizes.NumOutputs = 1; %输出变量个数
sizes.NumInputs = 5; %输入变量个数
sizes.DirFeedthrough = 1; %输入信号是否在输出端出现
sizes.NumSampleTimes = 0; % at least one sample time is needed
sys = simsizes(sizes);
x0 = []; %初始值
str = [];
ts = []; %[0 0]用于连续系统,[-1 0]表示继承其前的采样时间设置
simStateCompliance = ‘UnknownSimState‘;
function sys=mdlOutputs(t,x,u) %计算输出子函数
J = 2;
thd = u(1);
dthd = u(4);
ddthd = u(5);
th = u(2);
dth = u(3);
e = th - thd;
de = dth;
c = 10;
s = c*e + de;
xite = 1.1;
k = 0;
ut = J*-c*(dth - dthd)-J*xite*sign(s) - J*ddthd ;
sys(1) = ut;
模型状态方程的s-function函数建立
function [sys,x0,str,ts] = plant(t, x, u, flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes; % 调用初始化子函数
case 1,
sys=mdlDerivatives(t,x,u); %调用计算微分子函数
case 2,
sys=[];
case 3,
sys=mdlOutputs(t,x,u); %计算输出子函数
case 4,
sys=[]; %计算下一仿真时刻子函数
case 9,
sys=[]; %终止仿真子函数
otherwise
DAStudio.error(‘Simulink:blocks:unhandledFlag‘, num2str(flag));
end
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes %初始化子函数
sizes = simsizes;
sizes.NumContStates = 2; %连续状态变量个数
sizes.NumDiscStates = 0; %离散状态变量个数
sizes.NumOutputs = 2; %输出变量个数
sizes.NumInputs = 1; %输入变量个数
sizes.DirFeedthrough = 0; %输入信号是否在输出端出现
sizes.NumSampleTimes = 1; % at least one sample time is needed
sys = simsizes(sizes);
x0 = [0, 0]; %初始值
str = [];
ts = [0 0]; %[0 0]用于连续系统,[-1 0]表示继承其前的采样时间设置
simStateCompliance = ‘UnknownSimState‘;
function sys = mdlDerivatives(t, x, u) %计算微分子函数
J = 2;
dt = sin(t);
ut = u(1);
sys(1) = x(2);
sys(2) = 1/J*(ut+dt);
function sys=mdlOutputs(t,x,u) %计算输出子函数
sys(1) = x(1);
sys(2) = x(2);
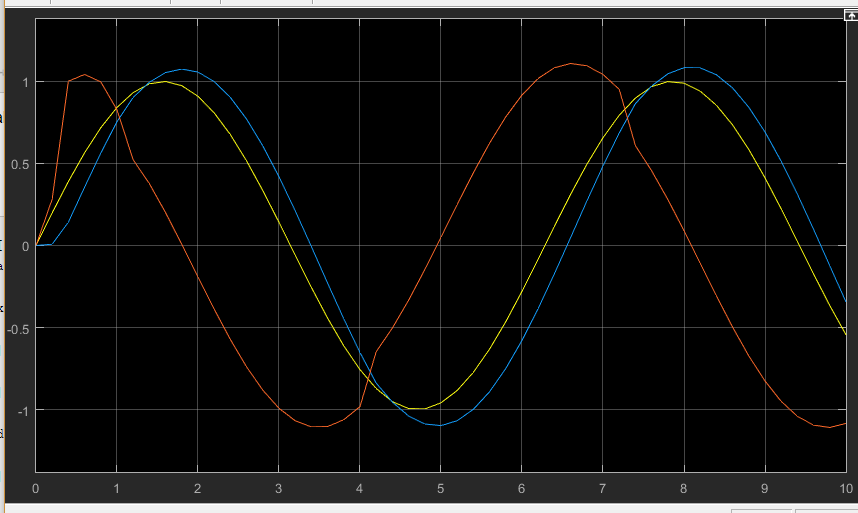
最终图像
蓝色是追踪角度thea曲线
黄色是sin曲线
橘红色是dthea曲线
原文:https://www.cnblogs.com/zhjblogs/p/14481521.html