视觉slam中,地图点大部分都是通过三角化给出初值,再利用最小化重投影误差进行优化细化; 其三角化过程先打给粗糙记录下:
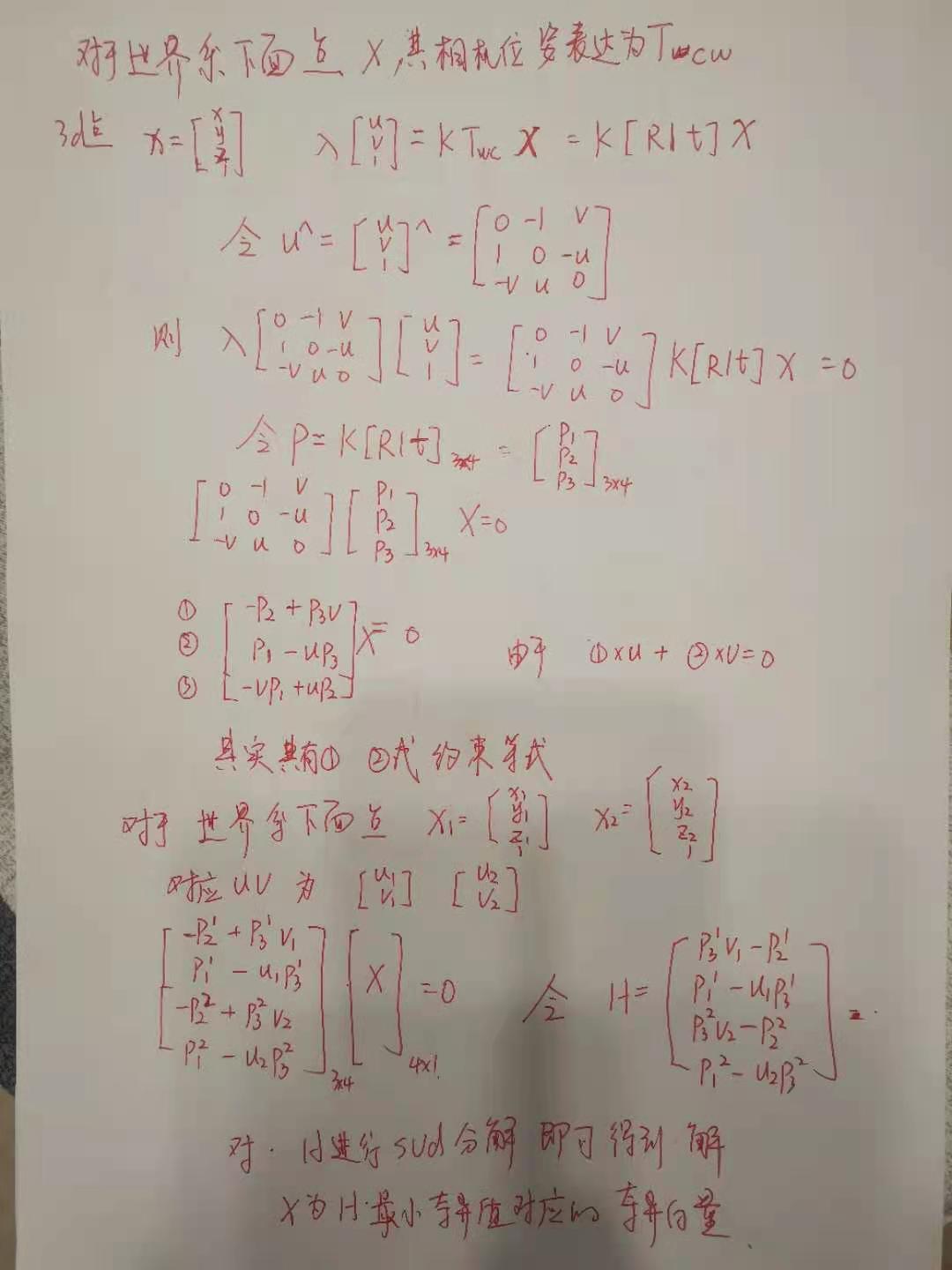
void triangulate ( const Eigen::Matrix3d& K, const Eigen::Matrix4d T1, const Eigen::Matrix4d& T2, const Eigen::Vector2d& uu1, const Eigen::Vector2d& uu2, Eigen::Vector4d& X ) { // construct P1 P2 const Eigen::Matrix<double, 3, 4> P1 = K * T1.block(0,0, 3, 4); const Eigen::Matrix<double, 3, 4> P2 = K * T2.block(0, 0, 3, 4); // get vectors const Eigen::Matrix<double, 1, 4>& P11 = P1.block(0, 0, 1, 4); const Eigen::Matrix<double, 1, 4>& P12 = P1.block(1, 0, 1, 4); const Eigen::Matrix<double, 1, 4>& P13 = P1.block(2, 0, 1, 4); const Eigen::Matrix<double, 1, 4>& P21 = P2.block(0, 0, 1, 4); const Eigen::Matrix<double, 1, 4>& P22 = P2.block(1, 0, 1, 4); const Eigen::Matrix<double, 1, 4>& P23 = P2.block(2, 0, 1, 4); const double& u1 = uu1[0]; const double& v1 = uu1[1]; const double& u2 = uu2[0]; const double& v2 = uu2[1]; // construct H matrix. Eigen::Matrix4d H; H.block(0, 0, 1, 4) = v1 * P13 - P12; H.block(1, 0, 1, 4) = P11 - u1 * P13; H.block(2, 0, 1, 4) = v2 * P23 - P22; H.block(3, 0, 1, 4) = P21 - u2 * P23; // SVD Eigen::JacobiSVD<Eigen::MatrixXd> svd ( H, Eigen::ComputeFullU | Eigen::ComputeFullV ); Eigen::Matrix4d V = svd.matrixV(); X = V.block(0, 3, 4, 1); X = X / X(3, 0); } // triangulate
原文:https://www.cnblogs.com/morningsunlll/p/14534543.html