本文适合有 C++ 基础的朋友
本期介绍基于 C++ 的 RPC 开源框架——rest_rpc,一个让小白也可以快速(10 分钟)开发 RPC 服务的框架。
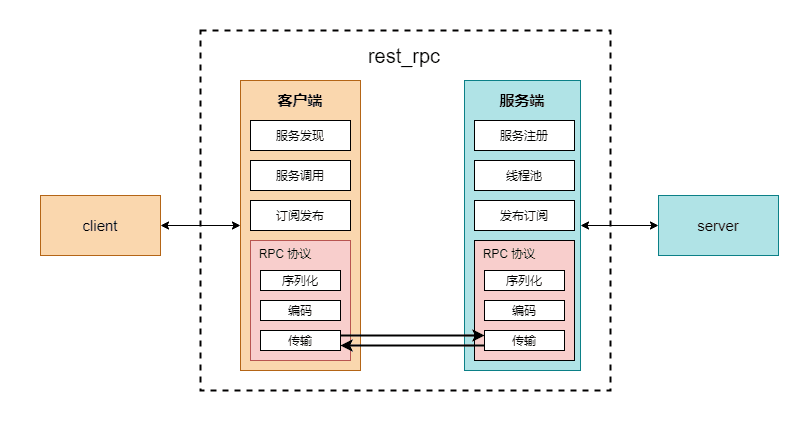
rest_rpc 是一个高性能、易用、跨平台、header only 的 C++11 RPC 库,它的目标是让 TCP 通信变得非常简单易用,即使不懂网络通信的人也可以直接使用它、快速上手。同时使用者只需要关注自己的业务逻辑即可。
简而言之 rest_rpc 能让您能在没有任何网络编程相关知识的情况下通过几行代码快速编写属于自己的网络程序,而且使用非常方便,是入门网络编程及 RPC 框架的不二之选!
RPC 是 Remote Procedure Call 即 远程过程调用 的缩写。
举个例子来讲,有两台服务器 A、B 现在 A 上的程序想要远程调用 B 上应用提供的函数/方法,就需要通过网络来传输调用所需的消息。
但是消息的网络传输涉及很多东西,例如:
客户端和服务端间 TCP 连接的建立、维持和断开
消息的序列化、编组
消息的网络传输
消息的反序列化等等
RPC 的作用就是屏蔽网络相关操作,让不在一个内存空间,甚至不在一个机器内的程序可以像调用普通函数一样被调用。
rest_rpc 有很多的优点:
使用简单
支持订阅模式
允许 future 和 callback 两种异步调用接口,满足不同人群爱好
rest_rpc 依赖 Boost 在使用之前应正确安装 Boost.
通过 git clone 命令将项目下载到本地:

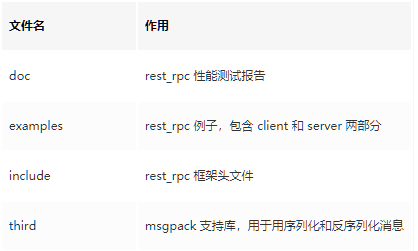
rest_rpc 项目根目录中文件及其意义如表所示:
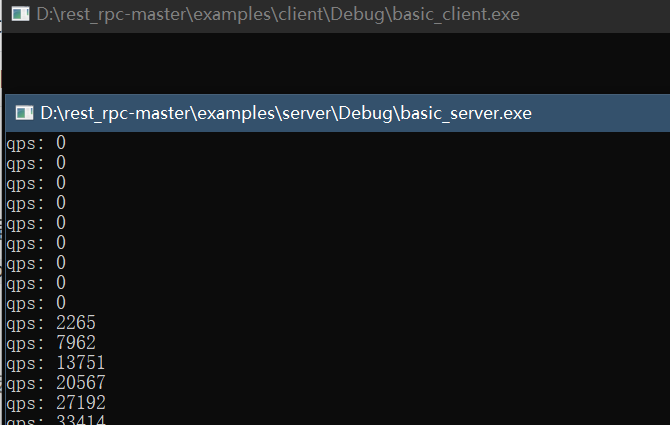
2.3 运行例程
rest_rpc 例程为 visual studio 工程,客户端和服务端例程分别存储在examples/client和examples/server中,直接使用 visual studio 打开basic_client.vcxproj或basic_server.vcxproj后直接编译即可,官方例程运行效果如图:

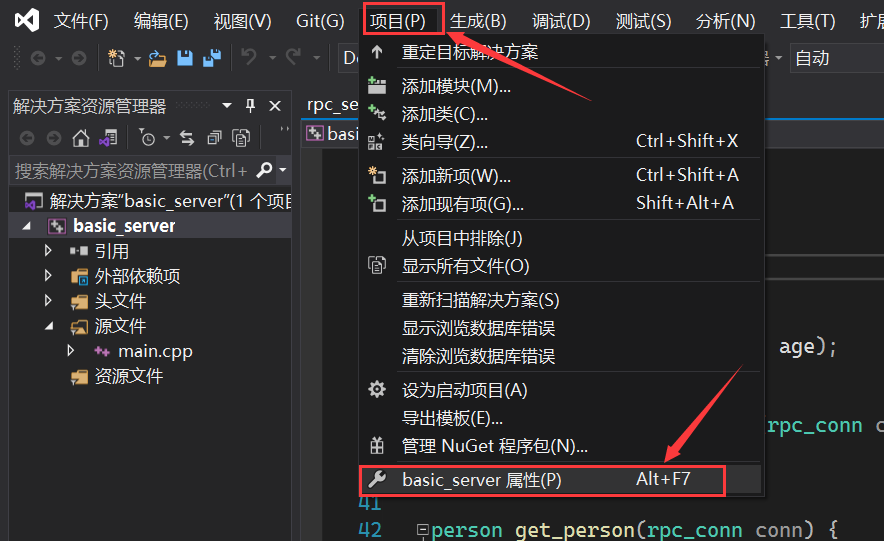
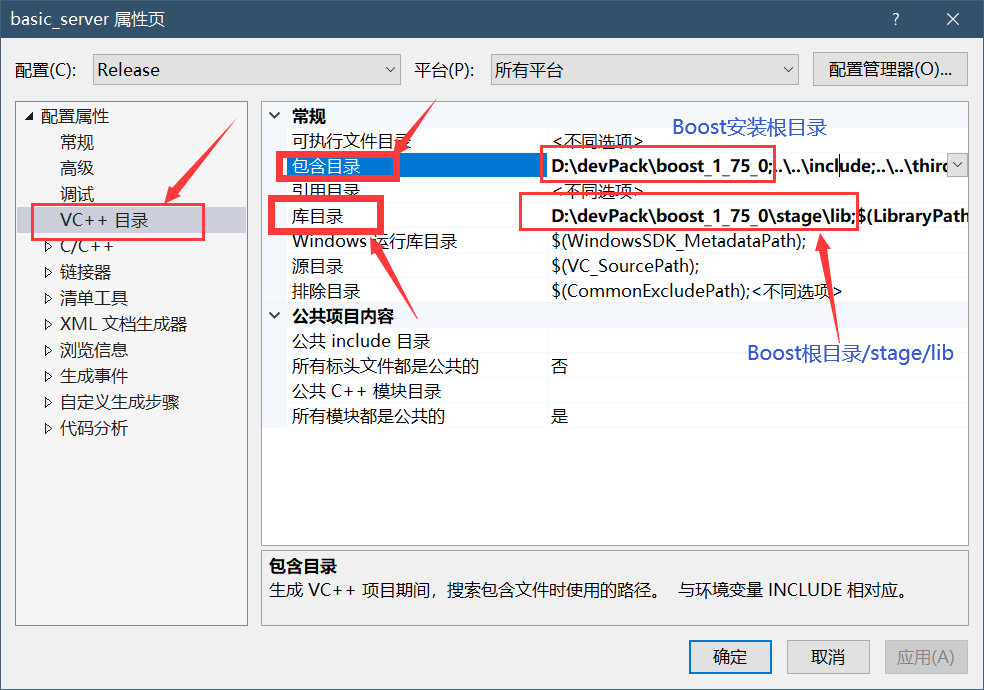
工程中添加Boost方法如下:
打开工程后点击菜单栏中的项目→属性(快捷键Alt+F7)
选择左边的VC++ 目录选项,在右边的包含目录和库目录中添加Boost的根目录和依赖库后保存
我使用的为Boost 1.75安装目录为D:\devPack\boost_1_75_0,配置过程如图所示:
3.1 写在前面
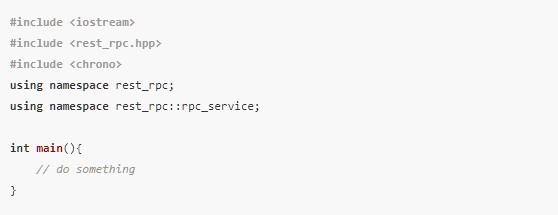
无论 服务端 还是 客户端 都只用包含 include/rest_rpc.hpp 这一个文件即可。
所有示例代码都是用了如下内容作为框架
生成一个能提供服务的客户端要经历一下几个过程:
1. rpc_server对象的实例化,设置监听端口等属性
2.服务函数的注册,定义服务端提供哪些服务
3.服务的启动
rpc_server为 rest_rpc服务端对象,负责注册服务、发布订阅、线程池管理等服务端基本功能,位于rest_rpc::rpc_service命名空间。
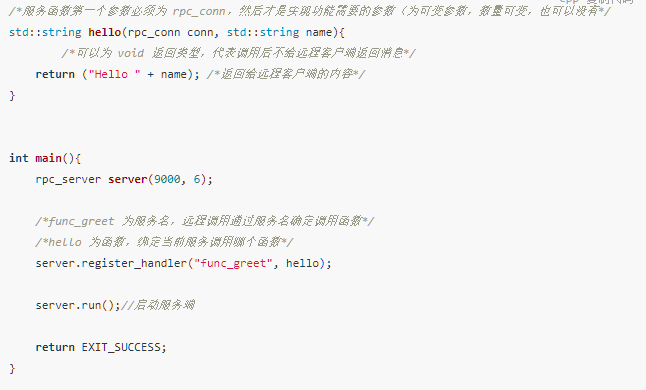
使用时需要先实例化一个rpc_server对象并提供 监听端口、线程池大小,例如:

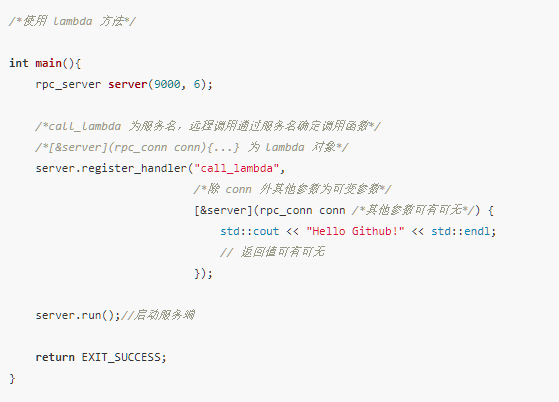
rpc_server 提供了 register_handler 方法注册服务以及 run 方法启动服务端,具体例子如下:
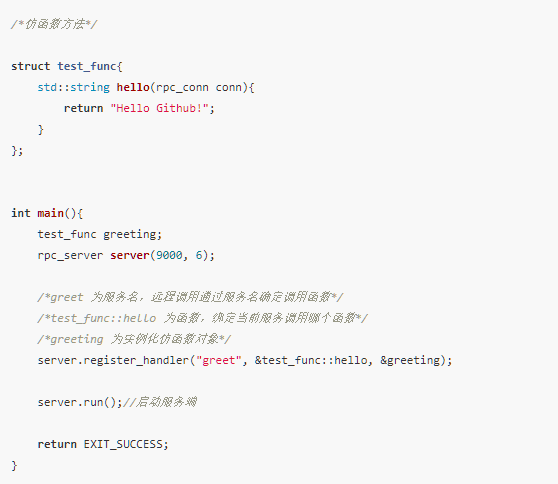
其中 function 可以为 仿函数 或 lambda,例子分别如下:
使用仿函数:
使用 lambda 方法的例子:
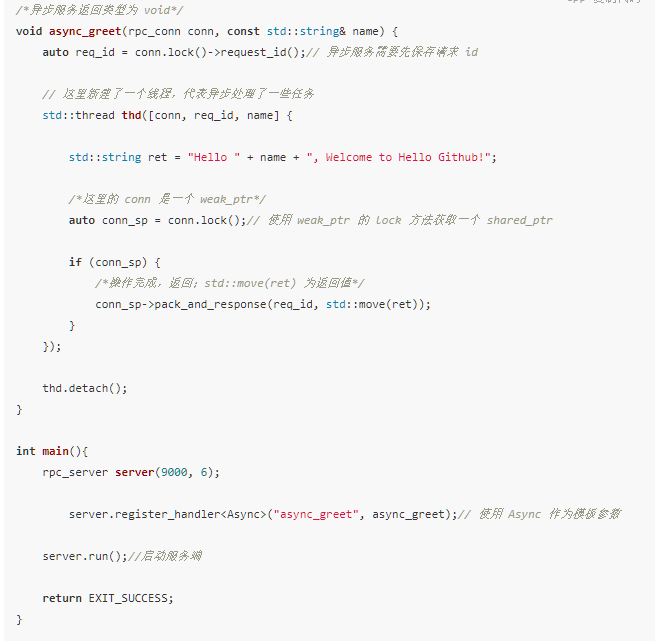
有时因为各种原因我们无法或者不希望一个远程调用能同步返回(比如需要等待一个线程返回),这时候只需给 register_handler 方法一个 Async 模板参数(位于 rest_rpc 命名空间):


生成一个能进行远程服务调用的客户端要经历以下过程:
1.rpc_client 对象实例化,设定服务端地址与端口
2.连接服务端
3.调用服务
rpc_client 为 rest_rpc 客户端对象,有连接服务端、调用服务端服务、序列化消息、反序列化消息等功能,位于 rest_rpc 命名空间。
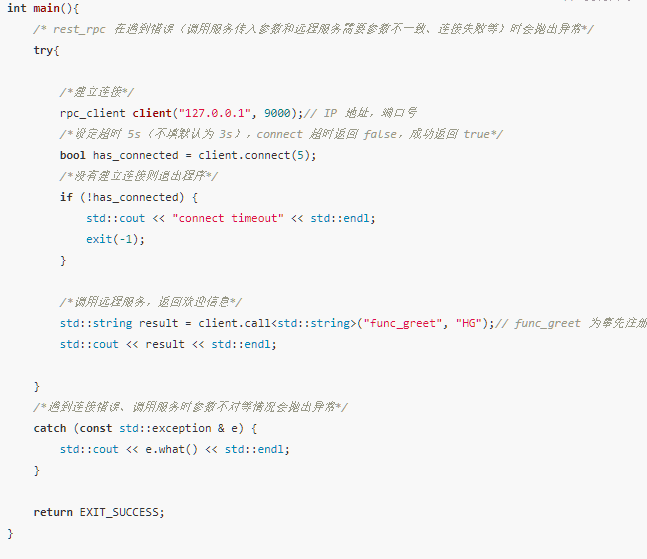
使用时需要先实例化一个 rpc_client 对象,然后使用其提供的 connect 或 async_connect 方法来 同步/异步 的连接到服务器,如:

当然,rpc_client还提供了enable_auto_reconnect和enable_auto_heartbeat功能,用于不同情况下保持连接。
rpc_client提供了async_call和call两种方式来 异步/同步 的调用远程服务,其中async_call又支持callback和future两种处理返回消息的方法,这部分介绍 同步 调用方法call。
在调用call方法时如果我们的服务有返回值则需要设定模板参数,比如远程服务返回一个整数需要这样指定返回值类型call<int>,如果不指定则代表无返回值。
在编写服务端部分我们说过每个服务在注册的时候都有一个名字,通过名字可以进行远程服务的调用,现在我们调用服务端部分写的第一个例子:
当然,有些调用也许没有任何消息返回,这是时候直接使用 client.call("xxx", ...) 即可,此时 call 方法返回类型为 void。
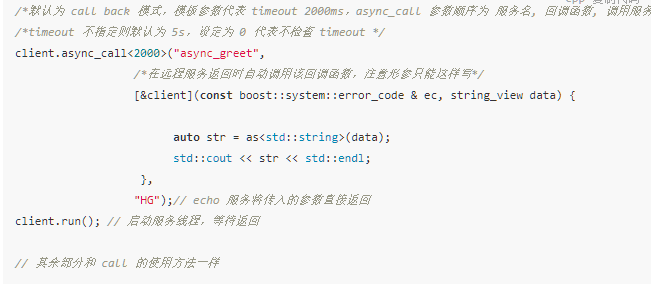
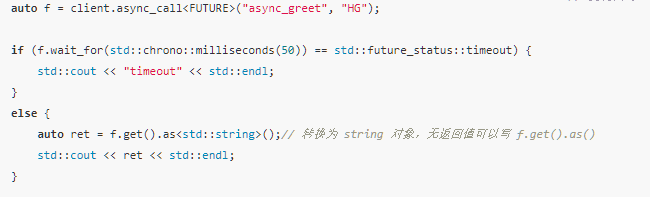
有些时候我们调用的远程服务由于各种原因需要一些时间才能返回,这时候可以使用rpc_client提供的异步调用方法async_call,它默认为 callback 模式,模板参数为 timeout 时间,如想要使用 future 模式则需要特别指定。
callback模式,回调函数形参要与例程中一样,在调用之后需要加上client.run():
Future 模式:
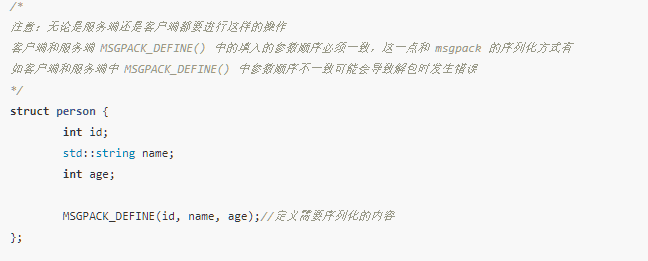
使用 rest_rpc 时如果参数是标准库相关对象则不需要单独指定序列化方式,如果使用自定义对象,则需要使用 msgpack 定义序列化方式,例如要传输这样一个结构体:

则需要加上 MSGPACK_DEFINE():
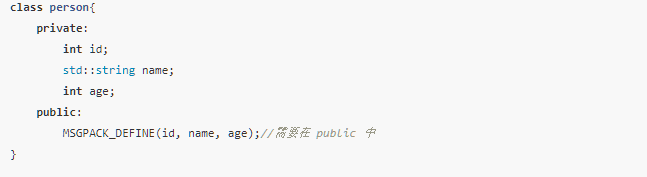
在对象中也是同理:
然后即可将 person 作为参数类型进行使用。
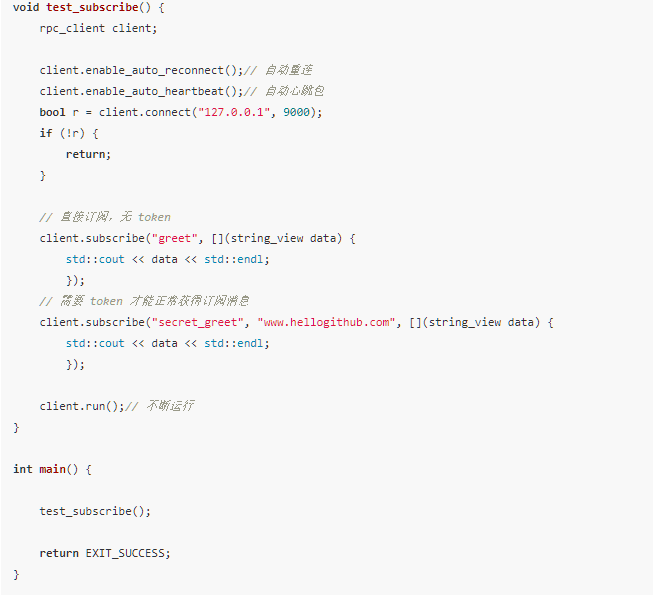
rest_rpc 的一大特色就是提供了 发布-订阅 模式,这个模式在客户端和服务端之间需要不停传输消息时非常有用。
服务端只需要使用rpc_server的publish或者publish_by_token方法即可发布一条订阅消息,其中如果使用 token 则订阅者需要使用相同的 token 才能访问,例如:

客户端 只需使用 rpc_client 的 subscribe 方法即可:
如果有这样一个对象需要传输
服务端 直接将其作为一个参数即可,例如:

客户端 需要进行 反序列化:
RPC 有很多成熟的工业框架如:
但是相较 rest_rpc 来讲配置和使用较为复杂。新手将 rest_rpc 作为 RPC 的入门项目是一个非常好的选择。
至此,相信你已经掌握了 rest_rpc 的绝大部分功能,那么是时候动手搞一个 RPC 服务啦!
刚学会 C++ 的小白用这个开源框架,做个 RPC 服务要多久?
原文:https://www.cnblogs.com/fher123/p/14610804.html