参考
4,KITTI数据集
5,KITTI数据集的使用——雷达与相机的数据融合(讲解了坐标系转换的公式)
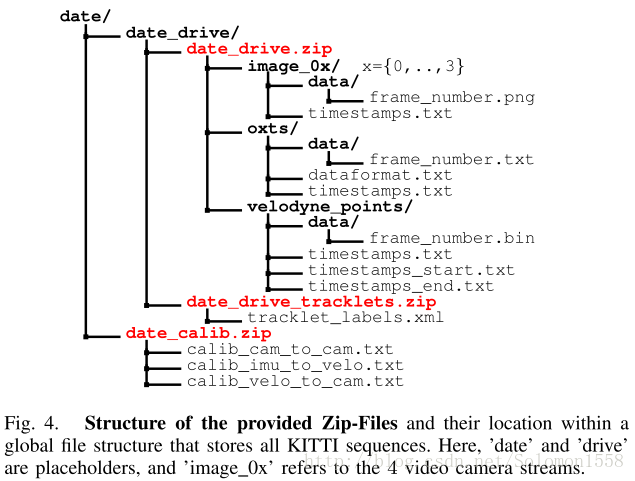

image_00:左侧灰度相机图像序列
image_01:右侧灰度相机图像序列
image_02:左侧彩色相机图像序列
image_03:右侧彩色相机图像序列
oxts:GPS/IMU位姿相关信息序列
velodyne_points:激光雷达数据序列
image_00 _01 ... 文件夹下:
data 图片文件
timestamps时间戳文件
oxts文件夹下:
数据文件
数据介绍
时间戳文件
velodyne_points文件夹
data: 包含有雷达扫描到的数据,点云形式,每个点以 (x,y,z,i) 格式存储,i为反射值
时间戳文件:start+end/2中心时间文件 start文件 end文件
calib文件:
calib_cam_to_cam.txt,包含各相机的标定参数
这里只用到最后两个矩阵R_rect和P_rect
calib_velo_to_cam.txt,从雷达坐标系到0号相机坐标系的转换
由此可以得出从雷达坐标系变换到xx号相机的图像坐标系的公式:
设X为雷达坐标系中的齐次坐标,Y为对应在xx号相机的图像坐标系的齐次坐标,则
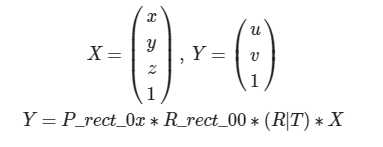
官网提供的样例代码中 run_demoVelodyne.m 实现了将雷达点云投影到相机图像
原文:https://www.cnblogs.com/ashuoloveu/p/14747461.html