PID原理
PID是指“比例”、“积分”、“微分”三项指标构成PID基本要素。每一项完成不同任务,对系统功能产生不同的影响。它的结构简单,参数易于调整,是控制系统中经常采用的控制算法。
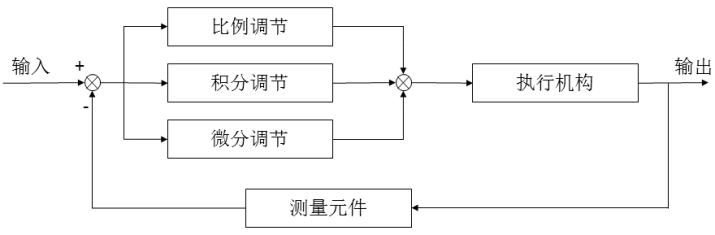
图4.5 PID控制原理图
PID控制公式:

其中u(t)为控制器输出的控制量(输出);e(t)为偏差信号,等于给定量与输出量的差值(输入);Kp为比例系数(对应参数P);Ti为积分时间常数(对应参数I);Td为微分时间常数(对应参数D)。
增量式PID控制
当执行机构需要控制的是控制量的增量时(例如驱动步进电机),由公式一推出增量PID控制公式:
![]()
其中比例P(这次误差-上次误差):e(k)-e(k-1);积分I(误差):e(i);微分D(这次误差-2*上次误差+上上次误差):e(k)-2e(k-1)+e(k-2),当确定了KP、KI、KD的值之后,只需要三次的测量值的偏差就可以控制增量,使用相对于位置式PID更加简单,运算量小。
原文:https://www.cnblogs.com/loveweiyuxin/p/14799284.html