

1.其表示是唯一的,一维数组代表顶点,二维数组存储图中的边或弧的信息。
2.对于含n个顶点的有向图还是无向图,无论边的数目是多少,其存储空间均为O(n^2)。
3.对于有向图,邻接矩阵数组第i行(或第i列)非0元素、非∞元素的个数正好是顶点i的出度(入度).
4.有向图的邻接矩阵要有顶点数组
5.常用于提取边权值的算法
1.其表示是不唯一的。
2.适用于提取某个顶点的所有邻接点的算法。
3.邻接表画法有三种分别是:无向图、有向图、有向带权图。
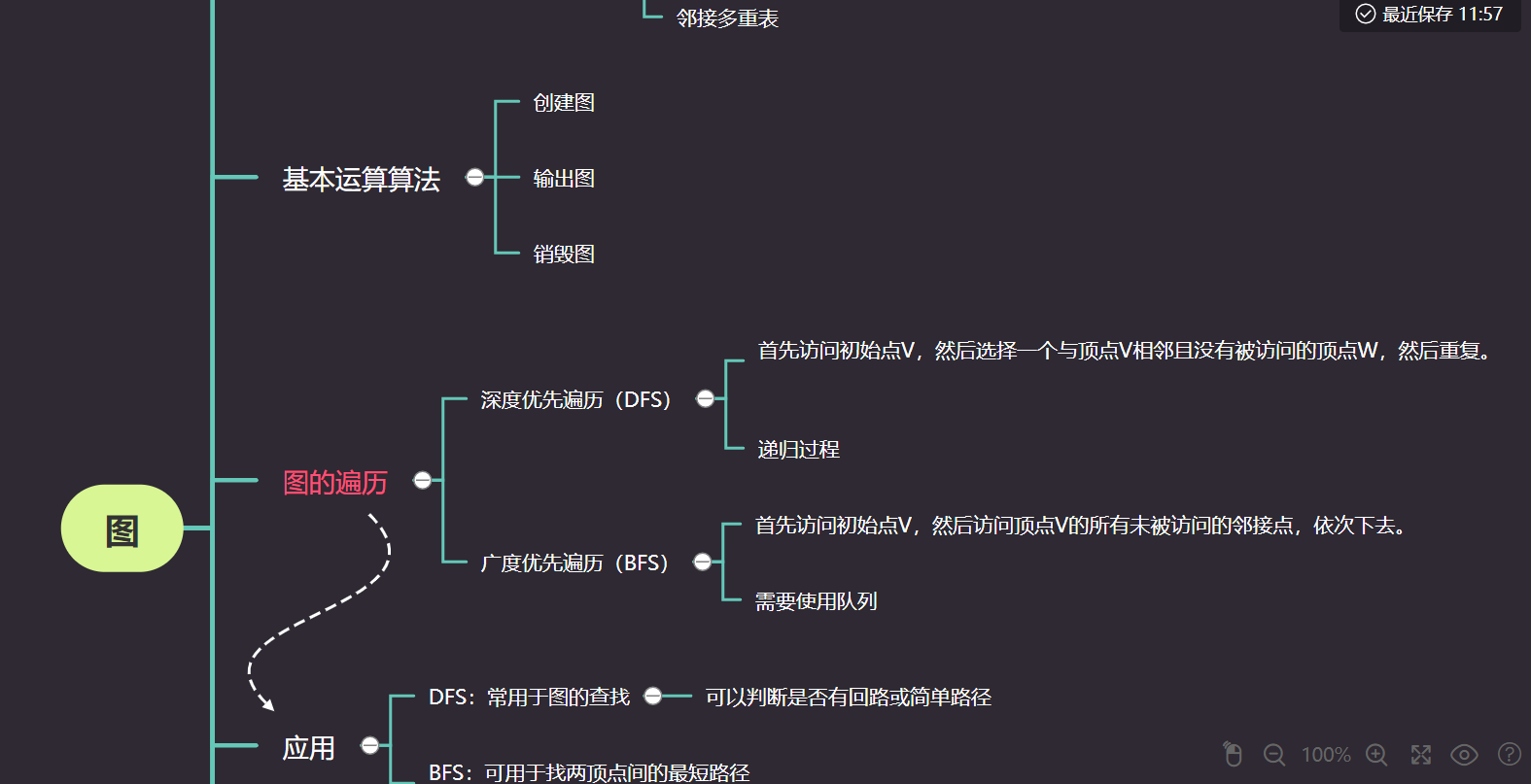
int visited[MAX]={0};//全局数组
void DFS(AdjGraph *G,int V)
{ArcNode *p;
visited[v]=1;//置以访问标记
printf("%d",v);
p=G->adjust[v].firstarc;//输出被访问顶点编号
while(!p==NULL)
{
if(visited[p->adjvex]==0)
DFS(G,p->adjvex);
p=p->nextarc//p指向下一个邻接点
}
}
用栈搜索迷宫路径使用DFS算法,用队列搜索迷宫路径使用BFS算法。
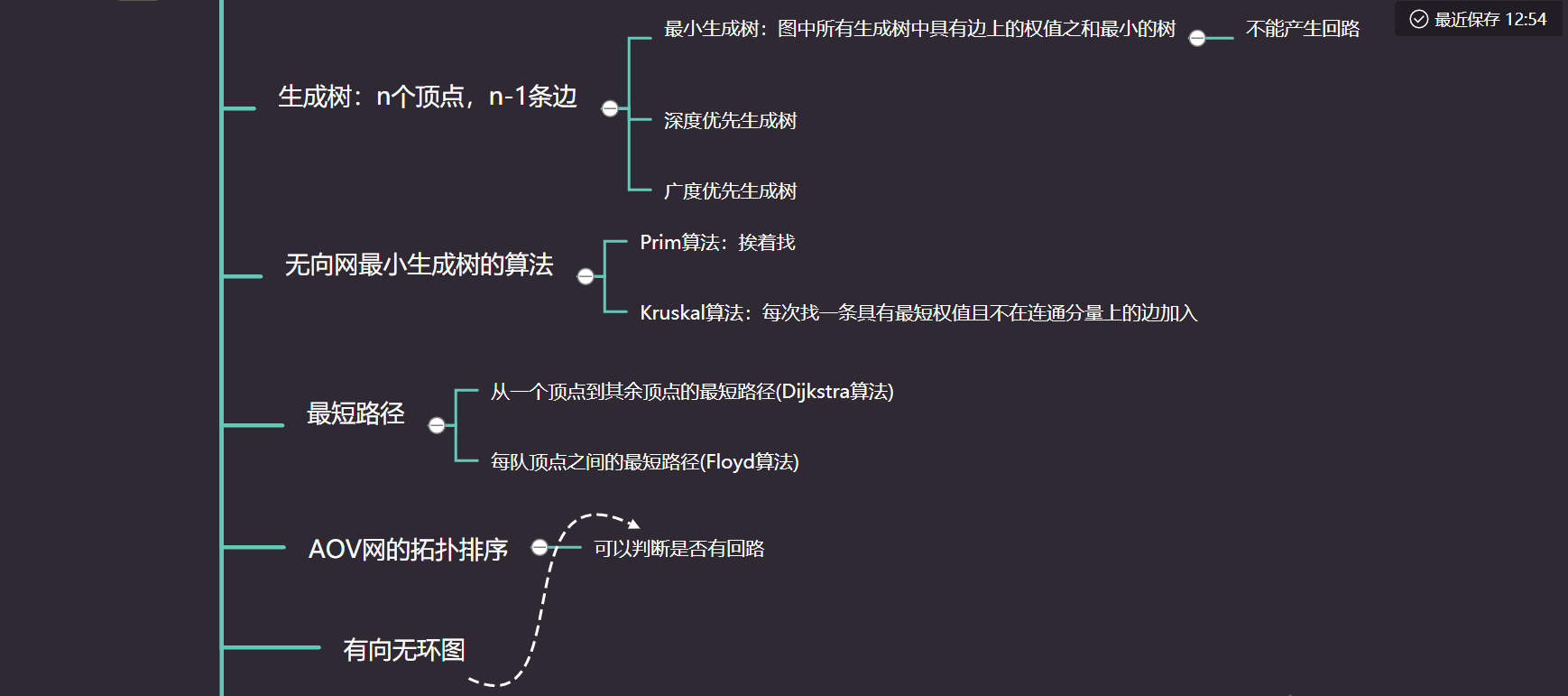
void MiniSpanTree_Prim(MGraph G)
{
int min;
int i,j,k;
int closest[MAXV]; //存贮最小边在 U 中的顶点
int lowcost[MAXV]; //存储最小边上的权值
for(i = 1; i < G.n; i++) //初始化,给lowcost[]、closest[]置初值
{
lowcost[i] = G.edges[0][i]; //将 v0 顶点存在边的权值存入 lowcost
closest[i] = 0; //初始化都为 v0 的下标
}
for(i = 1; i < G.n; i++)//找出(n-1)个顶点
{
min = INFINITY; //初始化最小权值为 ∞
j = 1;
k = 0;
while(j < G.n) //循环全部顶点
{
if(lowcost[j] != 0 && lowcost[j] < min)///如果权值不为0,并且权值小于min
{
min = lowcost[j]; //令当前权值为最小值
k = j; //当前最小值的下标赋给 k
}
j++;
}
cout <<closest[k] << k; //输出当前顶点边中权值最小边
lowcost[k] = 0; //表示该节点已添加入生成树
for(j = 1; j < G.n; j++)
{
if(lowcost[j] != 0 && G.edges[k][j] < lowcost[j])
{ //若下标为 k 的顶点各边权值小于当前顶点未被加入生成树权值
lowcost[j] = G.edges[k][j]; //将最小权值存入 lowcost
closest[j] = k; //将下标为 k 的顶点存入 closest
}
}
}
}
void MiniSpanTree_Kruskal(MGraph G)
{
int i,n,m;
Edge edges[MAXE]; //定义边集数组
int parent[MAXV]; //判断回路的并查集
for(i = 0; i < G.n; i++)//循环每一条边
{
n = Find(parent, edges[i].begin);
m = Find(parent, edges[i].end);
if(m != n) //若 n 和 m 不相等,则说明回路不存在(这条边的两端点不在同一个连通)
{
parent[n] = m; //将此边结尾顶点放入下标为起点的 parent 中
cout << edges[i].begin << edges[i].end << edges[i].weight << endl;
}
}
}
int Find(int *parent, int f) //查连线顶点的尾部下标
{
while(parent[f] > 0)
f = parent[f];
return f;
}
1.S[]:以求出最短路径的顶点集合
2.path[]:从v0到终点vi的最短路径上,vi的前驱节点;若v0到vi没有路径则用-1作为前驱节点序号
3.D[]:是记录v0到vi的最短路径的长度,若v0到vi有直接路径则其初态为弧的权值,若无则为 ∞
void ShortestPath_DIJ(MGraph g, int v0)
{ //初始化
int v,min;
int Path[MAXV],S[MAXV],D[MAXV];
for(int i = 0; i < g.n; i++)
{
S[i] = false; //S 初始化为空集
D[i] = g.edges[v0][i]; //将 v0 到各个终点的弧的权值
if(D[i] <MAXINT) //v0 到 i 的弧存在,设置前驱为 v0
{
Path[i] = v0;
}
else //v0 到 i 的弧不存在,设置前驱为 -1
{
Path[i] = -1;
}
}
S[v0] = true; // v0 加入 S
D[v0] = 0; //源点到源点本身的距离为 0
/*初始化结束,开始最短路径求解*/
for(int i = 1; i < g.n; i++) //依次考虑剩余的 n - 1 个顶点
{
min = MAXINT;
for(int j = 0; j < g.n; j++)
{
if(S[j] == false && D[j] < min) //若 vj 未被添加入 S 且路径最短
{
v = j; //选择当前最短路径,终点是 v
min = D[j];
}
}
s[v] = true; //将 v 加入 S
for(int j = 0; j < g.n; j++)
{
if(S[j] == false && (D[v] + g.edges[v][j] < D[j])) //判断是否要更新路径
{
D[j] = D[v] + g.edges[v][j];
Path[j] = v; //修改 vj 的前驱为 v
}
}
}
}
1.图用邻接矩阵存储
2.二维数组D[][]:存放顶点对之间最短路径长度
3.path[][]:从Vi到Vj最短路径上,Vj的前驱节点序号
void ShortestPath_Floyd(MGraph g)
{
int Path[MAXV][MAXV]; //最短路径上顶点 vj 的前驱节点的序号
int [MAXV][MAXV]; //记录顶点 vi 和 vj 之间的最短路径长度
int i,j,k;
for(int i = 1; i < g.n; i++)
{
for(int j = 1; j < g.n; j++)
{
D[i][j] = g.edges[i][j];
if(D[i][j] < MAXINT && i != j)
{
Path[i][j] = i; //若 i 和 j 之间有弧,则将 j 的前驱置为 i;
}
else
{
Path[i][j] = -1; //若 i 和 j 之间没有弧,则将 j 的前驱置为 -1;
}
}
}
for(int k = 0; k < g.n; k++)//依次考察所有顶点
{
for(int i = 1; i < g.n; i++)
{
for(int j = 1; j < g.n; j++)
{
if(D[i][k] + D[k][j] < D[i][j]) //从 i 经过 k 到 j 的路径更短
{
D[i][j] = D[i][k] + D[k][j]; //修改路径长度
Path[i][j] = Path[k][j]; //修改最短路径
}
}
}
}
Dispath(g,D,path)//函数输出最短路径
}
1.从有向图中选取一个没有前驱的顶点并输出他
2.从图中删去该顶点,及该顶点出发的边
3.重复上面步骤直至图中不存在没有前驱的顶点
1.事件的最早发生时间ve=顶点v的最早发生时间。
2.事件的最晚发生时间vl=即顶点v的最晚发生时间(每个事件最晚需要开始的时间)。
3.活动的最早开始时间e=弧ai的最早发生时间。
4.活动的最晚开始晚时间l=弧ai的最晚发生时间。


查找网上内容,学会了如何通过s1和s2的计较,看他们是否相同,来判断路径中是否有回路,这个方法也可以用在拓扑排序中。
原文:https://www.cnblogs.com/wsj2496/p/14824930.html