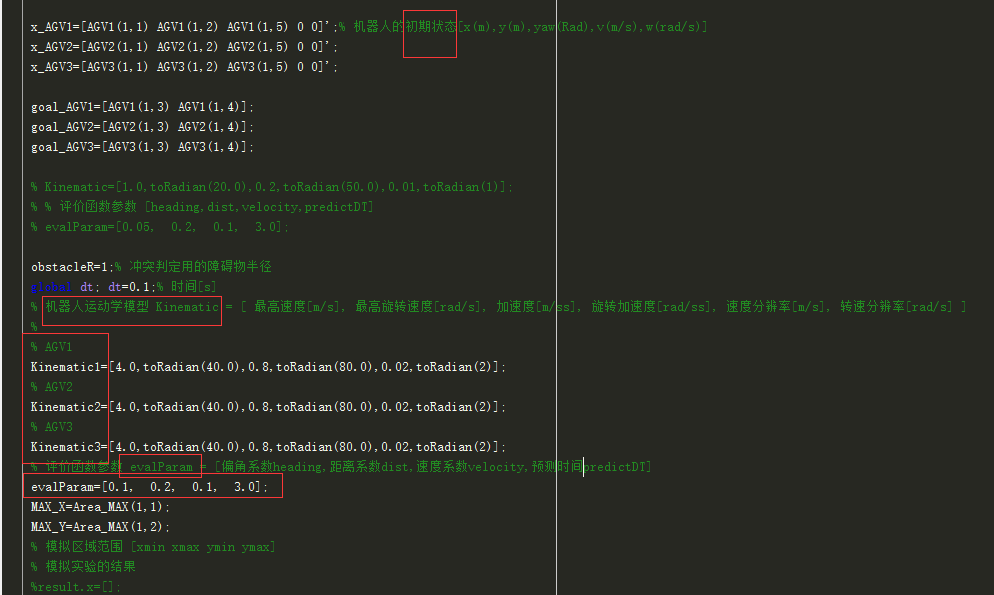
机器人运动学模型 Kinematic = [ 最高速度[m/s], 最高旋转速度[rad/s], 加速度[m/ss], 旋转加速度[rad/ss], 速度分辨率[m/s], 转速分辨率[rad/s] ]
评价函数参数 evalParam = [偏角系数heading,距离系数dist,速度系数velocity,预测时间predictDT]
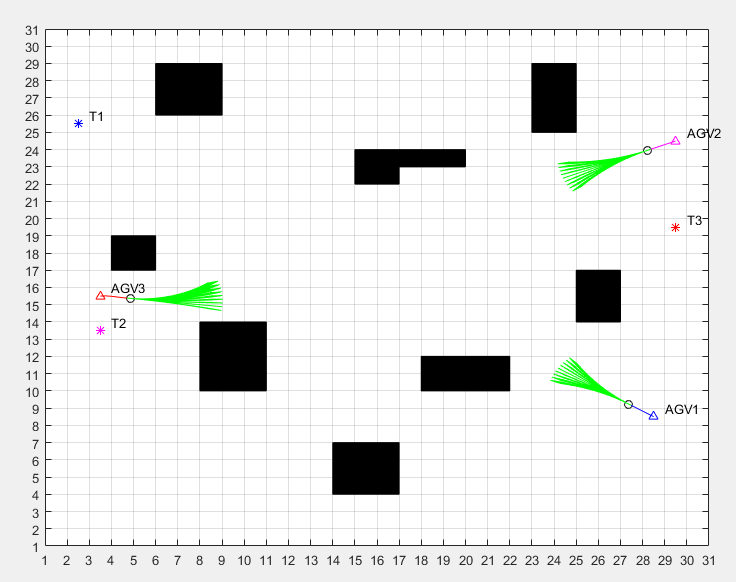
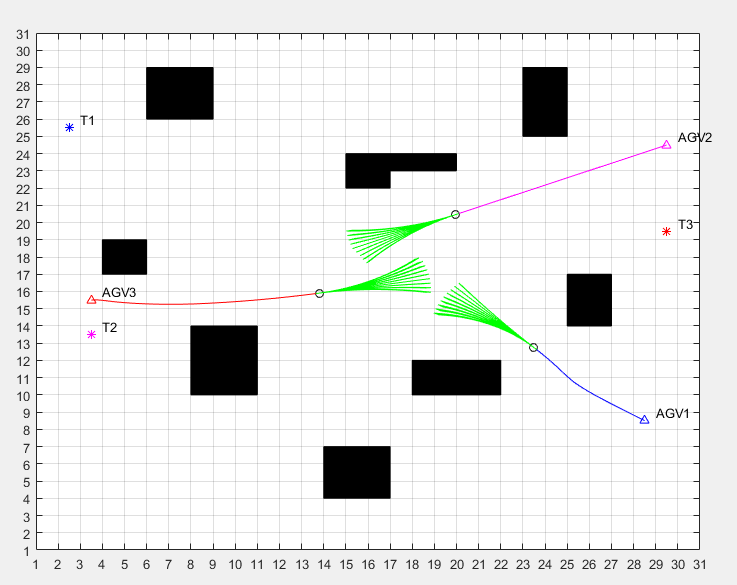
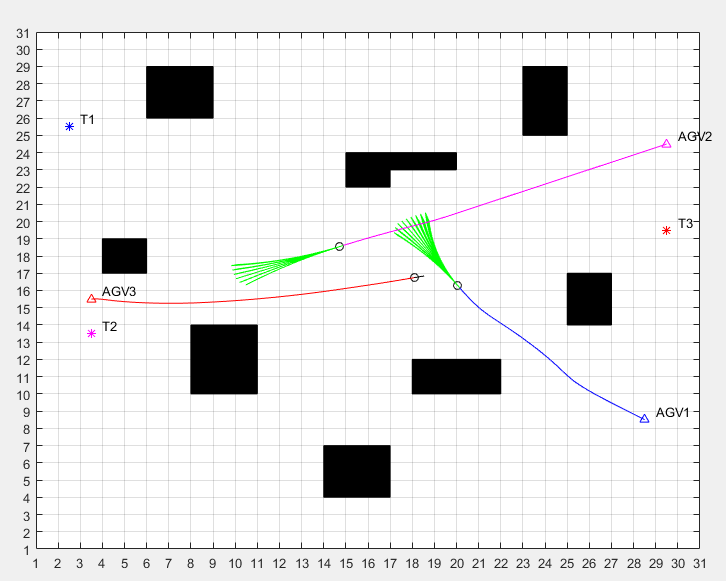
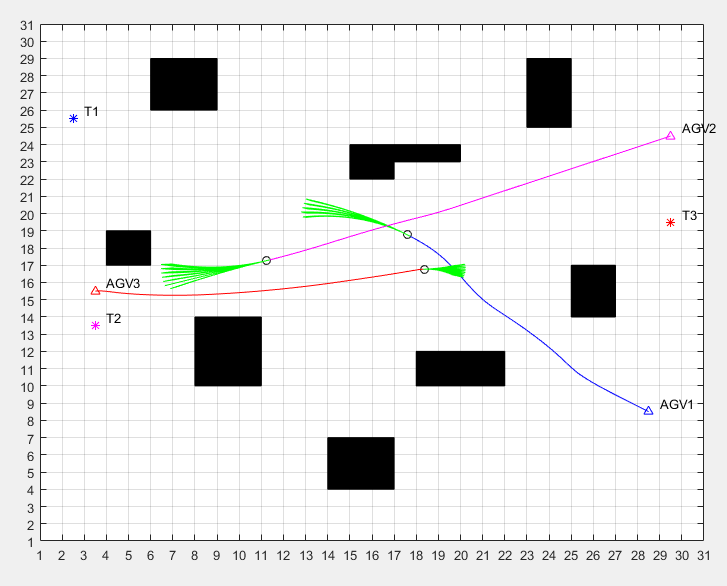
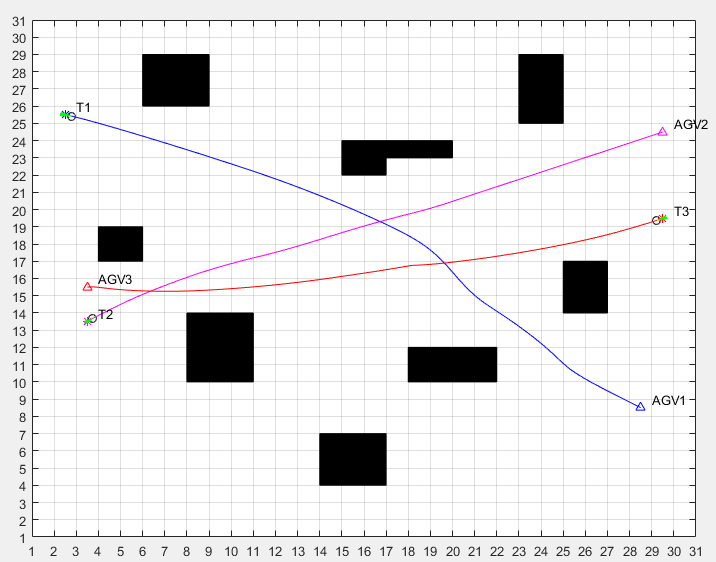
多AGV动态实时规划,设置每个AGV的运动参数,使其运动实时避障。
多AGV相遇时,优先级高的AGV优先通过,优先级低的原地等待。
原文:https://www.cnblogs.com/DissertationSubmitted/p/14998689.html