two-stage(两阶段):Faster-rcnn mask-rcnn
one-stage(一阶段):YOLO系列
直接从一整张图像来预测出bounding box 的坐标、box中包含物体的置信度和物体所属类别概率

优势:速度快,适合做实时检测任务!
缺点:准确率不会太好
缺点:速度较慢,达不到实时检测的目的
优点:准确率高
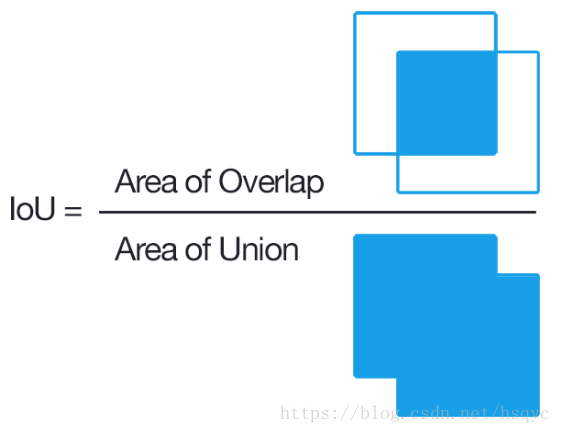
IOU:
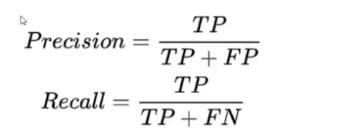
预备概念:精度、召回率(postive(P):被检测到,negtive(N):没检测到; true(T):判定对了,false(F):判定错了)
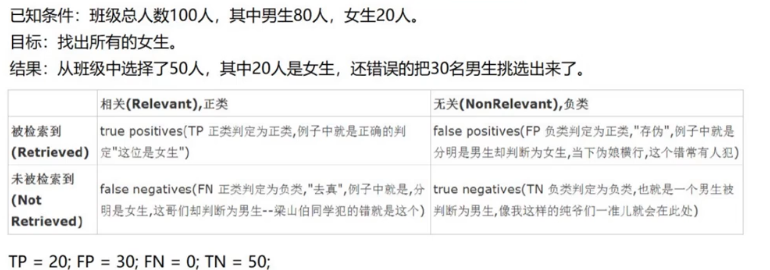
例如:
有3张图如下,要求算法找出face。蓝色框代表标签label,绿色框代表算法给出的结果pre,旁边的红色小字代表置信度。
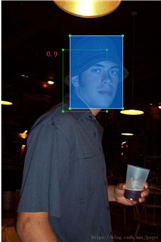
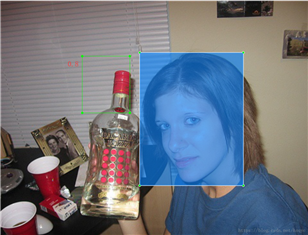

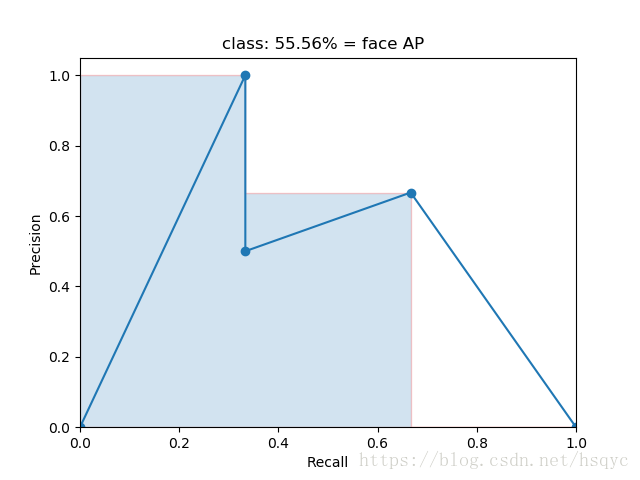
当选取 置信度阈值=0.9时(过滤掉置信度小于0.9的预测结果),TP+FP=1, TP=1; FN=2, precision=1/1, recall=1/3.
当选取 置信度阈值=0.8时(过滤掉置信度小于0.8的预测结果),TP+FP=2, TP=1; FN=2, precision=1/2, recall=1/3.
当选取 置信度阈值=0.7时(过滤掉置信度小于0.7的预测结果),TP+FP=3, TP=2; FN=1, precision=2/3, recall=2/3.
原文:https://www.cnblogs.com/dzwclimber/p/15092317.html