本章主要是推导viewMatrix和设计一个基本的camera功能
笔记一.viewMatrix的推导
关键语句:
1.在world坐标系中的物体怎么在camera坐标系中描述,等价于world坐标系中的物体和camera一起变换,使camera坐标系和world坐标系重合。
2.标准正交矩阵的逆和转置等价
已知参数:camera的position,三个朝向向量
推导过程:1.平移到原点 2,进行旋转变换
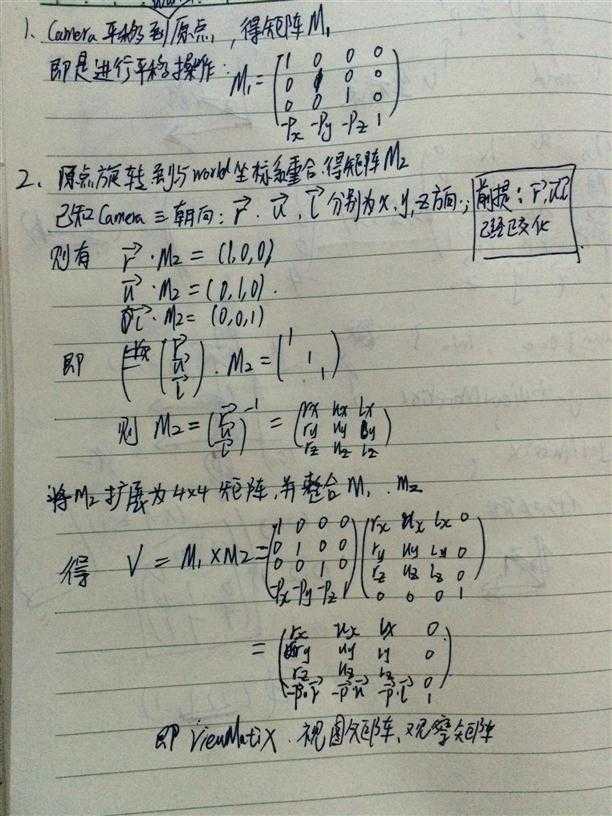
还有个Matrix没有推导,就是 点p绕任意轴旋转的matrix....
笔记二:
camera类的功能实现:1.初始化,确定好cameraType,是land类型还是任意airType
2.getViewMatrix , 根据camera的position right up look得到viewMatrix
3.六种操作方式:前后、左右、上下、绕right旋转、up旋转、look旋转
4.camera的变化依据时间timeDelta,这样不依据帧率,来保持稳定的变化速度
龙书9 chapter12 viewMatrix的推导和camera的基本功能实现
原文:http://www.cnblogs.com/dust-fly/p/4190301.html