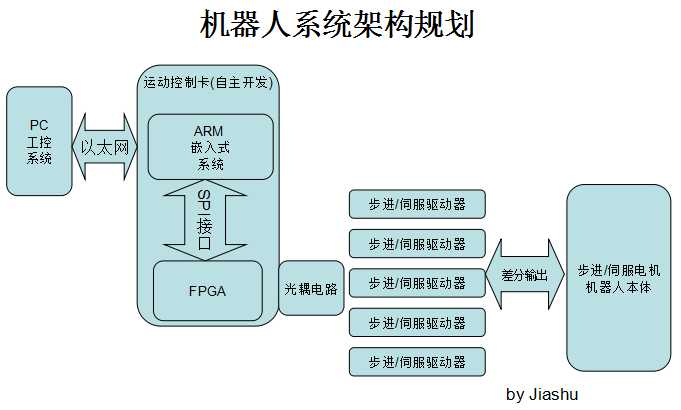
上图是目前初步规划系统架构,一般6轴的机器人都会自带手柄,可以再里面示教,编程,完成所有的操作。有想过用手柄,但是那个不是目前最重要的,我觉得与其在嵌入式手柄上不如在Windows环境的PC上编程来得容易,最近本人有用Epson机器人做项目,Epson的RC7是基于电脑控制的,可以不用手柄,用网络或者USB连接的,速度基本可以满足要求。
关于用ARM嵌入式系统,我选择STM32的嵌入式系统做Ascii的语言编程,基于C语言的,本来打算用Altera的NiosII系统构建一个嵌入式系统的,但是听说NiosII FPGA的需要收授权费,而且用做FPGA的做ASCII不大专业,还不如用专业几十年的ASCII芯片做算法。
本来想做一个运动控制卡做产品,其实也可以同步做的,运动控制电路板做好了,电脑网络与运动控制板通讯,开发电脑端的SDK供用户调用,一个N轴的运动控制卡就可以实现了。
后面的驱动器以及电机等用普通工业的步进/伺服电机,前期可能用步进,后期等佳叔有钱了,用上伺服+谐波减速机,再加上设计的机械臂加工件,可以算上一个比较完整的Demo了,先立一个贴,饭要一口一口吃,一步一个脚印,相信这个计划可以实现……
原文:http://www.cnblogs.com/jiashuchan/p/4374975.html