一、点在多边形内的测试
1.多边形
N条边N个顶点构成一条闭合曲线v0,v1,......,vn-1,v0
2.乔丹曲线定理(Jordan Curve Theorem)
一条简单闭合曲线将平面分为两部分:内和外
3.奇偶测试
从点p向任一方向做射线,计算其与多边形的交点:奇则p在内部,偶则在外部
4. 缠绕数目测试
链接测试点和边界,沿着边界移动,看缠绕了该点多少圈
二、多边形的光栅化
1.基本多边形光栅化算法
基于奇偶性测试
步骤:
①计算每条边和其所有扫描线的交点I(x,y)并把它们存至一个列表里
②用(x,y)对交点进行分类
③从列表中提取范围并设置范围内的像素
问题:
如果一个多边形的顶点落在扫描线上,是计0、1还是2个交点
解决:
将一条边看做半闭合区间,y小的那边做闭合,y大的那边做开放
水平线不做考虑
效率低
2.扫描线多边形算法
增强扫描线和边的一致性
使用边表(ET)和活动边表(AET)
算法:
①假定多边形的顶点被扫描转换至整数坐标
②以y递增的方向进行扫描,每一条x轴的平行线都是一条扫描线
③对图形的边,有如下两种情况:
i.边与扫描线平行,不参加求交点运算,在扫描转换的过程中直接填充
ii.边与扫描线不平行,参加求交点运算
④扫描线可能与边界在顶点相交,又有两种情况:
i.该顶点在局部取最值(如:√)
ii.不取最值
这里利用前边讲到的取半开半闭区间可以避免这个问题
步骤:
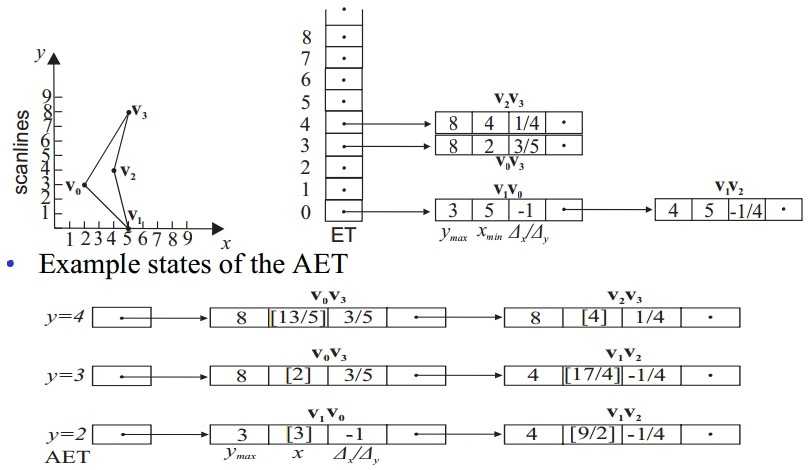
①建立一个边表(ET)
在ET表示ymin,y=ymin时添加该边的记录。ymax为该边的y的最大值,xmin为ymin对应的x坐标值,然后有斜率的倒数以及指向下一条y=ymin的边
②以y递增进行扫描,当边的ymin等于当前扫描值时,将该边加入AET;当ymax≤y时,将该边从AET中移除
③对AET中的边进行求交,并进行两两配对,每一对表示多边形内部,进行填充
3.三角光栅化算法
最简单的平面凸多边形光栅化算法(GL_POLYGON应该就是这样实现的吧)
利用3条线的方程来判定一个点是不是在多边形内部:如果该点坐标带入3个方程所得结果的符号相同,则在同一个多边形内部(为什么呢?)
算法:

triangle1 ( vertex v0, v1, v2, colour c ) { line l0, l1, l2; float e0, e1, e2, e0t, e1t, e2t; /* Compute the line coefficients (a,b,c) from the vertices */ mkline(v0, v1, &l0); mkline(v1, v2, &l1); mkline(v2, v0, &l2); /* Compute bounding box of triangle */ bb_xmin = min(v0.x, v1.x, v2.x); bb_xmax = max(v0.x, v1.x, v2.x); bb_ymin = min(v0.y, v1.y, v2.y); bb_ymax = max(v0.y, v1.y, v2.y); /* Evaluate linear functions at (bb xmin, bb ymin) */ e0 = l0.a * bb_xmin + l0.b * bb_ymin + l0.c; e1 = l1.a * bb_xmin + l1.b * bb_ymin + l1.c; e2 = l2.a * bb_xmin + l2.b * bb_ymin + l2.c; for(y=bb_ymin; y<=bb_ymax; y++) { e0t = e0; e1t = e1; e2t = e2; for(x=bb_xmin; x<=bb_xmax; x++) { if(sign(e0)==sign(e1)==sign(e2)) setpixel(x,y,c); e0 = e0 + l0.a; e1 = e1 + l1.a; e2 = e2 + l2.a; } e0 = e0t + l0.b; e1 = e1t + l1.b; e2 = e2t + l2.b; } }
原文:http://www.cnblogs.com/l00196472/p/3616775.html